- +1
机器,能换位思考吗?
中国科学院自动化研究所类脑智能研究中心曾毅团队充分借鉴认知心理学、认知神经科学、神经影像学等学科在思维揣测领域的研究成果,融合思维揣测的多尺度神经基础,所涉及的脑区、脑区功能及神经环路,以及可塑性原理,利用脉冲神经网络构建并实现了类脑思维揣测脉冲神经网络模型,实现了机器人的自我经验学习,并利用自我经验实现对他人信念的揣测,及根据他人信念预测他人的行为,使机器人可以通过错误信念任务,获得初步的类脑思维揣测/认知共情的能力。相关工作近期发表在Frontiers in Neurorobotics上。
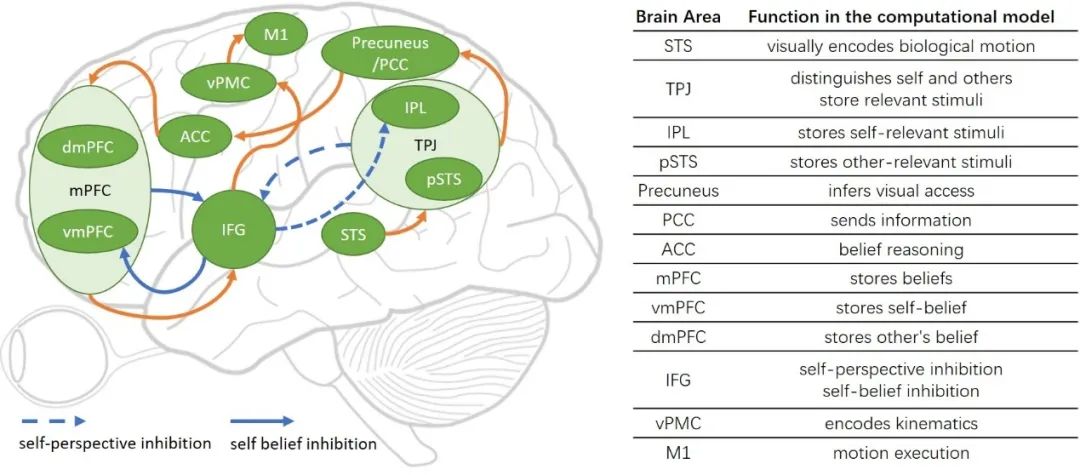
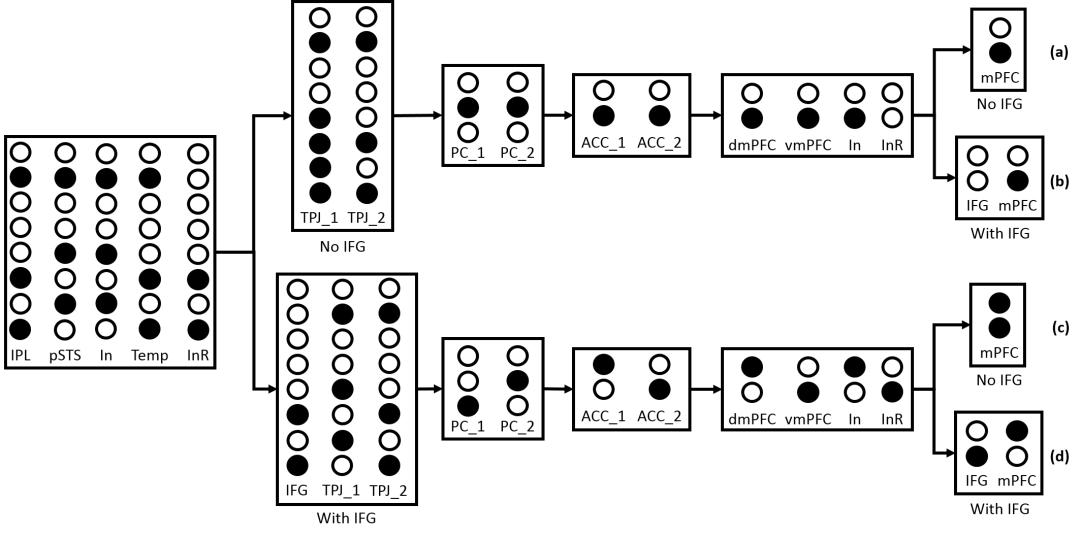
曾毅研究员介绍,思维揣测作为一种高级认知功能,其神经基础和神经机制尚未彻底研究清楚,如何结合现有研究基础,探索其机制,构建兼具生物合理性和计算可行性的类脑思维揣测理论模型是需要解决的关键问题。团队借鉴已有的生物学发现,采用类生物神经元的脉冲神经元计算模型及具有生物合理性的可塑性计算模型对思维揣测所涉脑区进行认知功能建模,并详细构建脑区间信息环路的连接结构,模拟了包括颞顶联合区(TPJ, temporo-parietal junction),内侧前额叶(mPFC, medial prefrontal cortex)在内的多个脑区及脑区间信息传递的通路,特别是额下回(IFG, inferior frontal gyrus)和颞顶联合区(TPJ)的自我视角抑制、额下回(IFG)和腹内侧前额叶(vmPFC, ventral medial prefrontal cortex)的自我信念抑制,如下图所示。
针对未来的工作,曾毅研究员坦言:“机器人的类脑思维揣测算是我们课题组继机器人通过类脑自我感知模型通过镜像测试后的又一大胆尝试,但是这仍然是万里长征第一步,我们的计算模型还需要更多的思维揣测/认知共情心理学实验去挑战,使这个模型更完善、更扎实。我们正在尝试突破更多的高级认知功能,希望这些努力能使我们向“结构机理类脑,认知功能类人”这一类脑人工智能的总体目标迈进,为突破通用智能的瓶颈奠定基础”。
科普小贴士
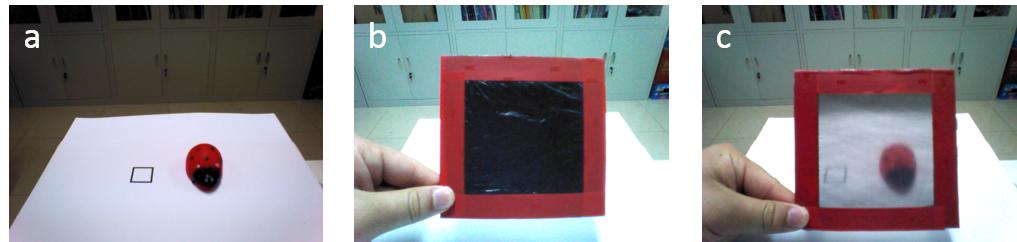
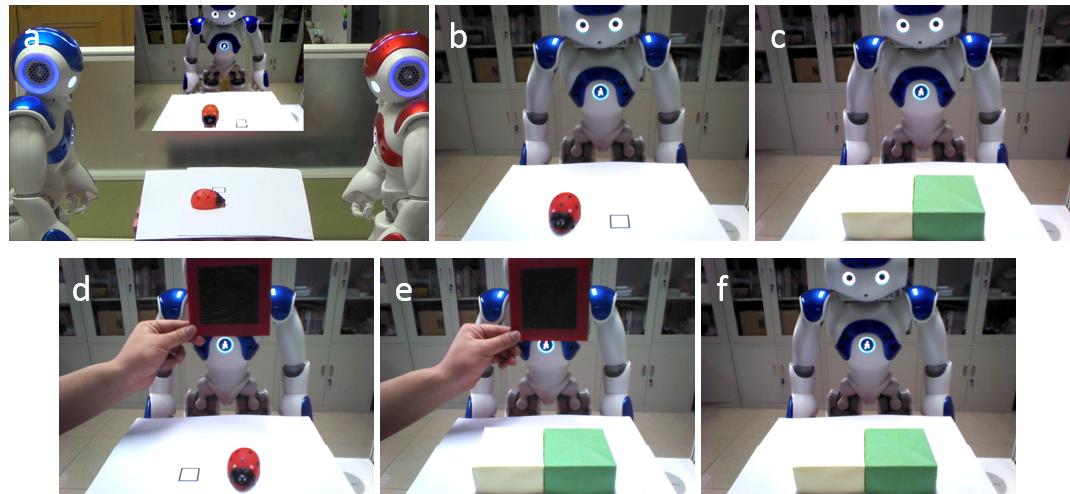
错误信念任务(False Belief Task)是验证个体是否具备思维揣测能力的经典心理学实验,一项经典的错误信念任务“不透明-透明眼罩测试”(Senju et al., Psychological Science, 2011)可以用来验证18个月的幼儿是否具备理解他人信念的能力:首先将幼儿分为两组,一组戴不透明眼罩,一组带透明眼罩,两种眼罩外观相同,但透明眼罩没有厚厚的中间层,因此是可以透视的;然后是眼罩熟悉过程,分别给带着眼罩的两组幼儿呈现不同的玩具,并问幼儿“xxx玩具(玩具的名称)在哪里”,经过一段时间后进行测试。测试时给幼儿放一段视频,视频中有一个演员、一个木偶,一个玩具和两个可以藏东西的盒子,盒子颜色分别为红色和绿色,视频分为熟悉试次和测试试次。熟悉试次1:木偶将玩具藏到绿色盒子中,然后离开场景,演员到绿色盒子中寻找物体。熟悉试次2:木偶将玩具藏到红色盒子中,然后离开场景,演员到红色盒子中寻找物体。测试试次:木偶将玩具藏到绿色盒子中,演员戴上眼罩,木偶将玩具从绿色盒子中拿出来,然后带着玩具离开场景,最后演员将眼罩摘掉,视频停止,记录幼儿的注视方向。实验发现,不透明眼罩组的幼儿会首先看向绿色的盒子,表明他们希望演员在绿色的盒子中搜索,说明他们可以正确理解演员对玩具位置的错误信念,仍然在绿色盒子中;透明眼罩组没有明显偏差,这表明他们没有将关于某个特定位置的信念归因于演员,因为物体已经从场景中移除,演员(如果她看到了木偶的动作)应该没有足够的依据来选择一个盒子而不是另一个盒子。
封面:Kouzou Sakai
论文链接:
https://www.frontiersin.org/articles/10.3389/fnbot.2020.00060/full
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

