- +1
伯克利的跳跃机器人,用那么小的脚也可以精准着陆了

来源:IEEE Spectrum
编译:木华
加州大学伯克利分校有一款名叫Salto的跳跃机器人深受研究人员喜爱,因为它一年比一年变得更好!而且这些变化并不是渐进式的——这个小机器人的能力似乎已经突飞猛进。
在“Virtual ICRA 2020”大会上发布的最新版本中,Salto的表现令人印象深刻,因为它已经学会了如何准确无误地在你指定的位置上停止跳跃。
正如我们所知,让Salto停止跳跃而不破坏自身的最佳方法是有人在它弹跳到空中时瞅准时机,将它直接捉住。Salto在跳跃方面的表现一直很惊艳,但它并不擅长着陆,不过现在,看这个!
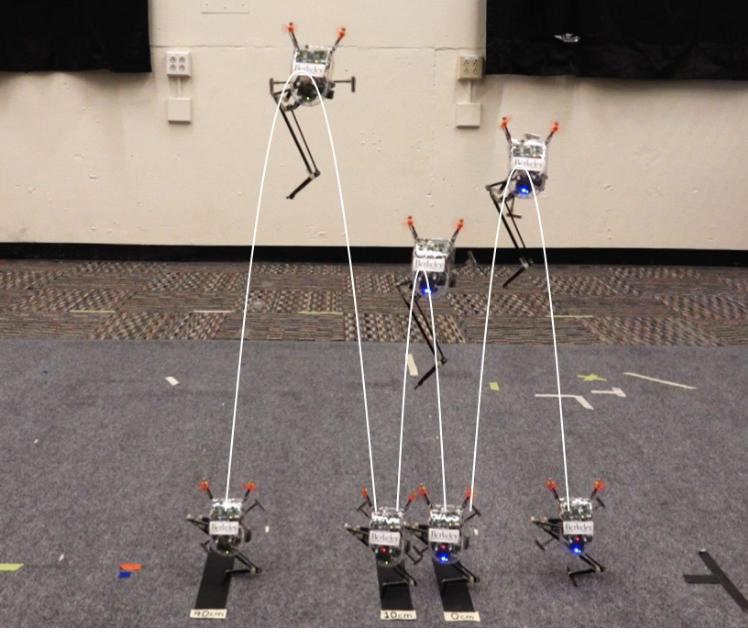
厉害吧!让人感觉惊讶的是这个令人难以置信的动力小机器人是用极小的脚着陆的。在视频中,你可以看到Salto在它的一维杆脚上着陆,但是根据ICRA论文,尽管它的推进器很难保持直立,但它也能够用点脚着陆。
着陆过程的大部分工作是由机器人在半空中完成的,使用是与上次迭代相同的硬件,即一个旋转的惯性尾翼加上一对螺旋桨推进器,以实现多轴稳定性。
尽管着陆令人印象深刻,这也只是这次变化的一半。正如你在视频中看到的,另外一件变化是Salto可以更好地控制前进的方向,从而可以将跳转目标定位在特定位置。
这种能力源于精确跳向目标点和平衡着陆的结合,它们使Salto可以更好控制下一跳,因为它有机会着陆并瞄准目标,而不是在跳跃时。这个机器人已经将与着陆目标的标准偏差从9厘米一直减少到1.6厘米,这意味着它能够处理树枝之类的小目标——我们迫不及待地想看到它的行动。
更多的详细信息,IEEE Spectrum对主要作者Justin Yim进行了采访。以下是IEEE Spectrum整理的访谈内容:
IEEE Spectrum:着陆困难在哪里?为什么Salto现在能着陆是件大事?
Justin Yim:当跳跃者以一定角度着陆,其下降运动可以转化为大量的角动量。Salto的着陆角度必须非常准确,否则角动量会太大,以至于反作用于轮尾无法抵消。从1米(3英尺)高处降落,Salto如果要保持其着陆,它只能前后摆动约2.3度。体操运动员用双脚并拢“着陆”面临同样的挑战。如果他们的角动量错误,他们必须迈出一步来保持平衡。然而,只用一条腿(如Salto那样)或者降落在狭窄的壁岩或横梁上时,迈出一步并不可能。降落在壁架或横梁上的人需要转动双臂,就像Salto反转轮尾一样。
现在Salto可以着陆了,它可以停止跳跃,站着不动了。Salto能够花更多时间在站立状态来准备它的下一跳,这样它就能够更准确地跳跃到狭窄的目标点。结合在狭窄支撑点上的固定着陆能力,我们希望这项研究让像Salto一样的机器人在像壁岩和树枝这样狭窄的立足点上跳来跳去。
IEEE Spectrum:某些早期版本中,Salto具有更大的脚,该论文提到此版本可以着陆在点脚上,但是杆脚更加稳定。你认为Salto的最佳脚部设计在未来会如何发展,特别是随着它的能力增强和操作环境的多样化?
Justin Yim:我认为设计巧妙的与地面接触的足部结构是很重要的。我们开始时让Salto用点脚弹跳,因为这是非常容易建模和控制的。只要不滑动或移动,一个点脚就像一个球窝关节一样,而更复杂的脚会根据地面的形状以不同的方式推动和扭转。然而,由于只有一个触点,一个点脚不能在地面上施加力矩来保持平衡,而且如果一个点很滑或者摇摇晃晃,它不能抓住地面的不同部分。目前,我们再次用点脚代替了杆脚,但是我们增加了两个脚趾到Salto的脚上,这样只有Salto蹲下时才能接触地面。这种方式下,Salto可以在它的跳跃时运行它的点脚,不过在着落时,可以获得杆脚的滚动力矩的好处。我们也在致力于其他被动脚部设计,以使它能够在其他表面上运行。
IEEE Spectrum:动作捕捉对Salto的迭代有多大的影响?
Justin Yim:Salto可以在没有动作捕捉的情况下跳跃和着陆,但是它更符合动作捕捉跟踪。Salto不靠动作捕捉的操作就像蒙住眼睛在四周奔跑,你依然可以保持平衡,四处走动,但是这很难做到。我们发送给Salto的动作捕捉信息是它的速度和一些指令,以达到磁带标记的顺序精确跳跃。Salto现在能够保持平衡而不需要任何动作捕捉信息。
IEEE Spectrum:Salto最初展示的是从一个垂直表面上跳下来——这是你想要回归的能力吗?
Justin Yim:我们想让Salto回到垂直表面上弹跳!早期的飞行阶段控制将很难做到足够精确的跳跃,并以合适的角度撞击墙壁。如果Salto跳入墙壁太远,它将崩溃。如果跳入墙壁的距离不够,它就会从墙上滑下去而不是从墙上跳下去。新的姿态–相平衡阶段使Salto可以更精准得开始跳跃。你可能已经注意到,Salto最初使用姿态–相平衡阶段的运动来指导它的早期墙跳。然而,那时候在新的平衡控制之前,我们必须非常小心得为每一个跳跃步骤手动调整Salto的运动。有了新的控制器,Salto可以更好得准确跳跃到我们想让它去的地方,而不需要任何的调整。
IEEE Spectrum:该论文提出了未来工作的一些可能方向。你最兴奋的是什么?
Justin Yim:有许多令人兴奋的方向!我最兴奋的是做机器人以前不擅长的事情!这可能是在树枝上跳跃,或者模仿其他动物会做但机器人很难做到的事情。
相关报道:
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/salto-jumping-robot-masters-pinpoint-landings
原标题:《伯克利的Salto跳跃机器人,用那么小的脚也可以精准着陆了!》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

