- +1
达摩院再获自动驾驶权威测评第一,车辆可识别厘米级障碍物
澎湃新闻
字号
5月8日,在自动驾驶权威数据集Semantic KITTI上,达摩院凭借全新算法在“单帧3D点云语义分割”排行榜获得第一。该技术用于达摩院的无人物流车后,大幅提升了车辆的环境精细化理解能力,使车辆能够识别“厘米级”障碍物。
KITTI数据集是全球最权威的自动驾驶计算机算法评测数据集,为促进基于激光的语义分割研究,KITTI推出了细分数据集Semantic KITTI,通过全类别分割平均交并比(mIOU)和整体准确率(accuracy)两大指标,考察参赛者的技术能力。达摩院团队在两项指标的评比中均拿下第一。
点云(Point Cloud)是拥有三维坐标、强度等信息的激光点的集合,是计算机视觉领域常用的三维数据表示方式。自动驾驶车辆通常借助激光雷达、摄像头、毫米波雷达等传感器识别环境信息。对于激光雷达获取的周围环境的3D点云,识别每个点的语义标签,就是“3D点云语义分割”。
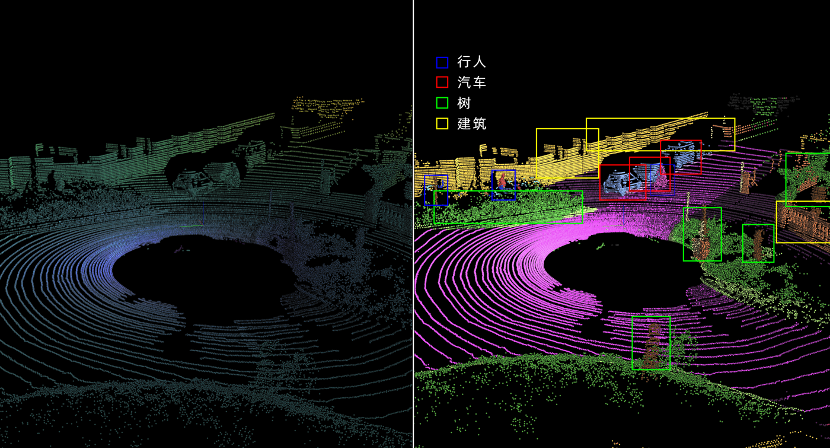
除了行人、车辆等常规检测目标,道路周围的建筑、绿化、不明障碍物也会影响自动驾驶车辆的驾驶行为,3D点云语义分割技术的目标,便是帮助车辆更精细地理解道路环境。
该算法应用于达摩院的无人物流车后,车辆对障碍物的精细化识别水平大幅提升。比如在行驶途中遇到临时拉起的警戒线,即便线宽仅有3厘米,物流车也能轻松识别并绕道而行。
责任编辑:承天蒙
澎湃新闻报料:021-962866
澎湃新闻,未经授权不得转载
+1
收藏
我要举报

查看更多

澎湃矩阵

新闻报料
- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司


反馈