- +1
“车位到车位”零接管?一路狂奔的理想端到端智驾做得到吗?
众所周知,“端到端”智驾技术是当前汽车圈的大热门,也成了当前重视智驾品牌的“兵家必争之地”。
而在一众汽车品牌中,理想汽车以不到4个月时间迭代超30个版本的速度,在端到端智驾方面加速狂奔。那么,理想端到端智驾,是否真正实现了功能和体验的双重进步呢?

在理想汽车近期举行的端到端智能驾驶体验日活动上,我们体验到了理想汽车基于“端到端+ VLM视觉语言大模式”架构而实现的“车位到车位” NOA领航智驾功能。
根据理想汽车的说法,这是“国内唯一,全球唯二的量产One Model架构端到端智驾系统”,毫无疑问,全球唯二的另一家车企,是海外的特斯拉。
国内车企一如既往地热衷与行业头部的特斯拉进行对比。在聊“端到端”智驾体验之前,我们先简单聊一下什么是“端到端”。
过去大家的智驾算法都是走“多步骤规则式”路线。从感知系统识别路况,到规划系统计算路线,再到控制系统执行路线,基本是一个线性的流程。很直观,但偏线性的流程也造成每一步计算都需要花费时间,整体响应速度偏慢,智驾反应会有滞后性。

端到端,则相当于把所有的流程都交给唯一的“一个系统”,也就是One Model架构去做,由系统接收所有的传感器数据,通过端到端大模型输出智驾路线,其中的识别、计算、执行流程并不是线性流程,更类似于人在驾驶时的本能反应,除了效率更高之外,智驾路线也更聪明和拟人化。
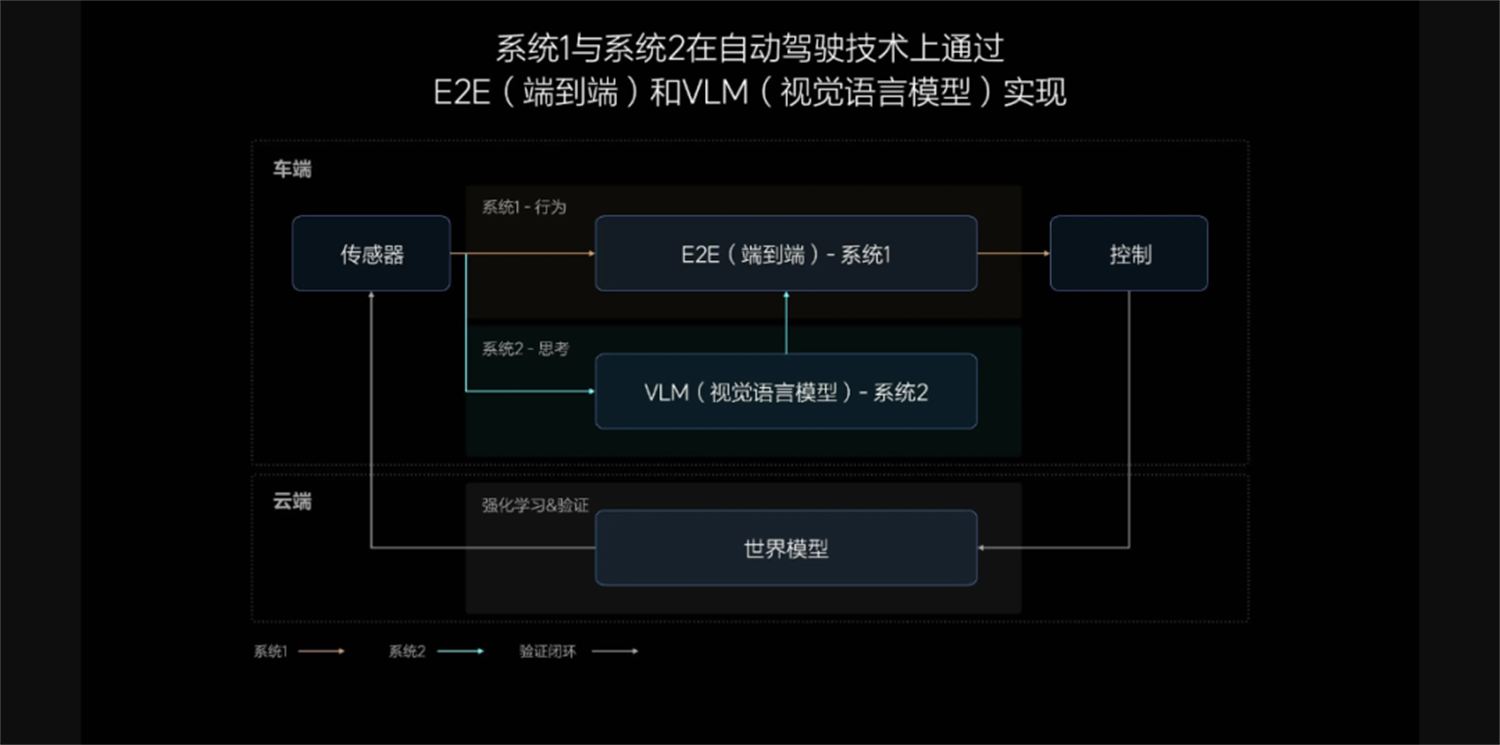
而VLM(视觉语言大模型),则可通过车身的相机图像及导航地图信息进行视觉信息编码,由VLM模型进行推理,可让车辆理解周围路况信息的特殊意义和规定,决策行驶轨迹。相当于VLM为理想的端到端智驾,在应对特殊高上限场景时,又添加了一双眼睛,来应对复杂状况。
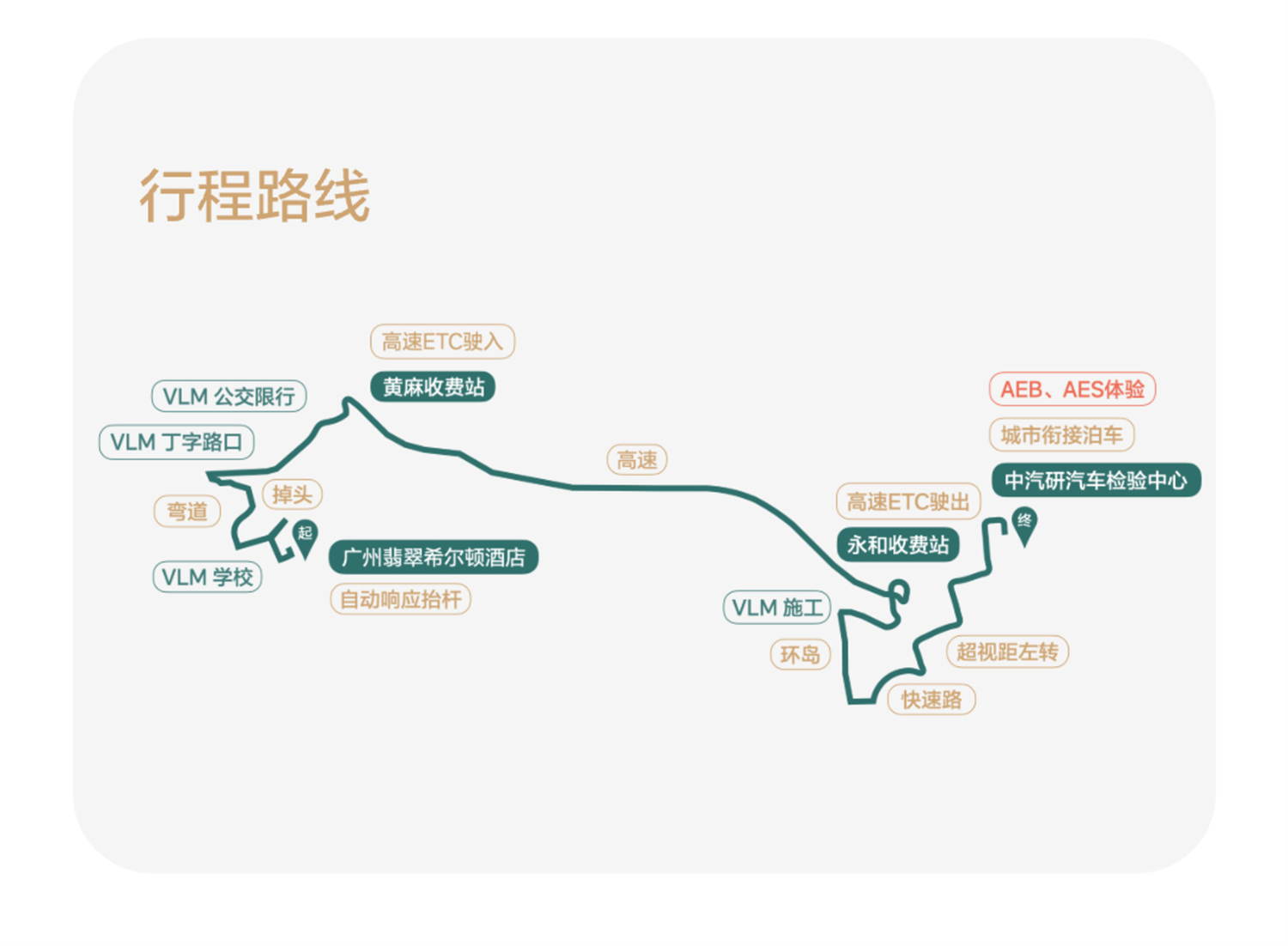
比如,在VLM系统支持下,理想智驾能够根据路牌信息,推理当前是否处于允许通行时间,继而决定是否可以在公交车道上通行。此外,VLM模型还能应对学校区域、潮汐/可变车道、路边施工信息及道路坑洼等的提示,让智驾系统的上限更高。

我们这次的试驾路线,涵盖了进出狭窄小区道路通行、无保护左转、环岛、U型掉头和复杂施工场景,甚至连高速收费站通过ETC匝道和停车场闸机都包含在内。在国内的一线城市中,广州的交通状况称得上复杂。而记者此次试驾的搭载了OTA6.5的理想车型,成功应对了上述几乎所有复杂路况,在U形掉头、复杂环岛、高速ETC通行、避让行人等场景下都表现丝滑,感觉就是人类司机在开车。
不过,在这段一小时左右的路途中,也遭遇了三次需手动接管的情况。一是在狭窄道路遇到同向行驶的电瓶车不敢绕行,相对比较保守。二是在高速上频繁出现靠最右边车道跟随大车的情况,通行效率不高。最后则是在一段市区道路上,出现了车道线来回偏移,车辆找车道而压线的问题。虽然都没有造成危险,但确实尚有小瑕疵,在现场跟理想汽车人员反馈后,他们也表示后续会继续进行版本迭代更新来提升体验。

其实,如果上述并未造成危险的情况我没有插手,从整体体验上来看,在录入了起点和终点车位的前提下,理想的这套端到端智驾已经能够实现全程零接管。上车只要按下屏幕上的出发键,之后就可以让车辆自行行驶到目标车位,作为当前法规下允许的智能辅助驾驶系统,理想的“端到端+ VLM”架构称得上同级第一梯队。
根据官方介绍,截至11月13日,理想汽车的智能驾驶累计里程已经达到26.7亿公里,较去年年底提升123%,主动安全累计避险次数超过360万次。
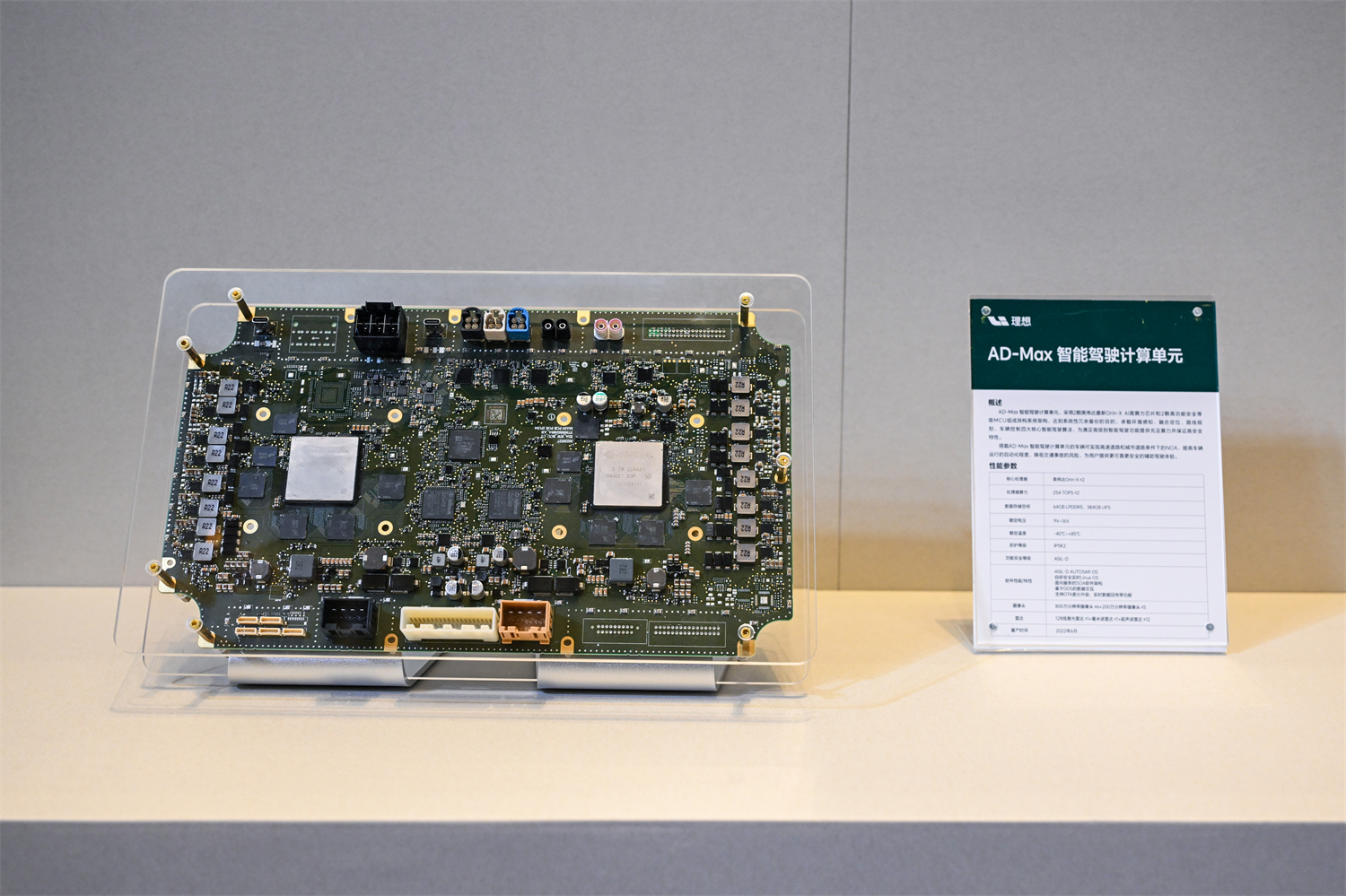
据悉,如今这套最新的智驾系统已经全量推送给拥有AD MAX的所有车主。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

