- +1
Nature封面:自动驾驶车辆安全验证的密集强化学习
原创 集智编辑部 集智俱乐部

关键词:密集强化学习,自动驾驶,安全验证,高维空间罕见事件

论文标题:Dense reinforcement learning for safety validation of autonomous vehicles
论文来源:Nature
论文链接:https://www.nature.com/articles/s41586-023-05732-2
自动驾驶汽车(autonomous vehicle,AV)的快速发展,把我们推上交通革命的风口浪尖。自动驾驶技术有可能极大提高运输安全性、机动性和可持续性,因此受到全世界各界人士的关注。虽然自动驾驶技术已取得了长足进步,但到目前为止,尚未达到商用的安全标准。
提高自动驾驶汽车安全性能的关键瓶颈在于:安全验证极其低效。主要是用软件模拟、封闭试验跑道和道路试验相结合的方式在无损检测(NDE)中对无人驾驶汽车进行试验。然而,在 NDE 上的测试通常需要测试数亿英里。为了提高效率,还有许多基于场景的方法,但主要适用于短场景路段。
验证无人驾驶技术的安全性能本质上是一个高维空间中罕见事件的估计问题,主要的挑战在于“维度灾难”(驾驶的时空环境复杂)和“稀有灾难”(影响安全的关键事件发生的概率低)的复合。
为解决这一挑战,最新发表在 Nature 的这篇文章开发了一种密集深度强化学习(dense deep-reinforcement-learning,D2RL)方法。基本思想是识别和删除非安全关键数据,并利用安全关键数据训练神经网络。他们开发了环境的智能测试,训练基于人工智能的后台主体,来验证自动驾驶汽车在加速模式下的安全性能,而不会失去无偏性(unbiasedness);基于自然驾驶数据,后台智能主体通过 D2RL 方法来学习执行什么样的应对策略。他们还在结合多模拟背景和现实环境测试了高度自动化的车辆,发现 D2RL 训练的主体可以加速测试过程达多个数量级(103到105倍)。此外,D2RL还能加速其他安全关键型自主系统的测试和训练。
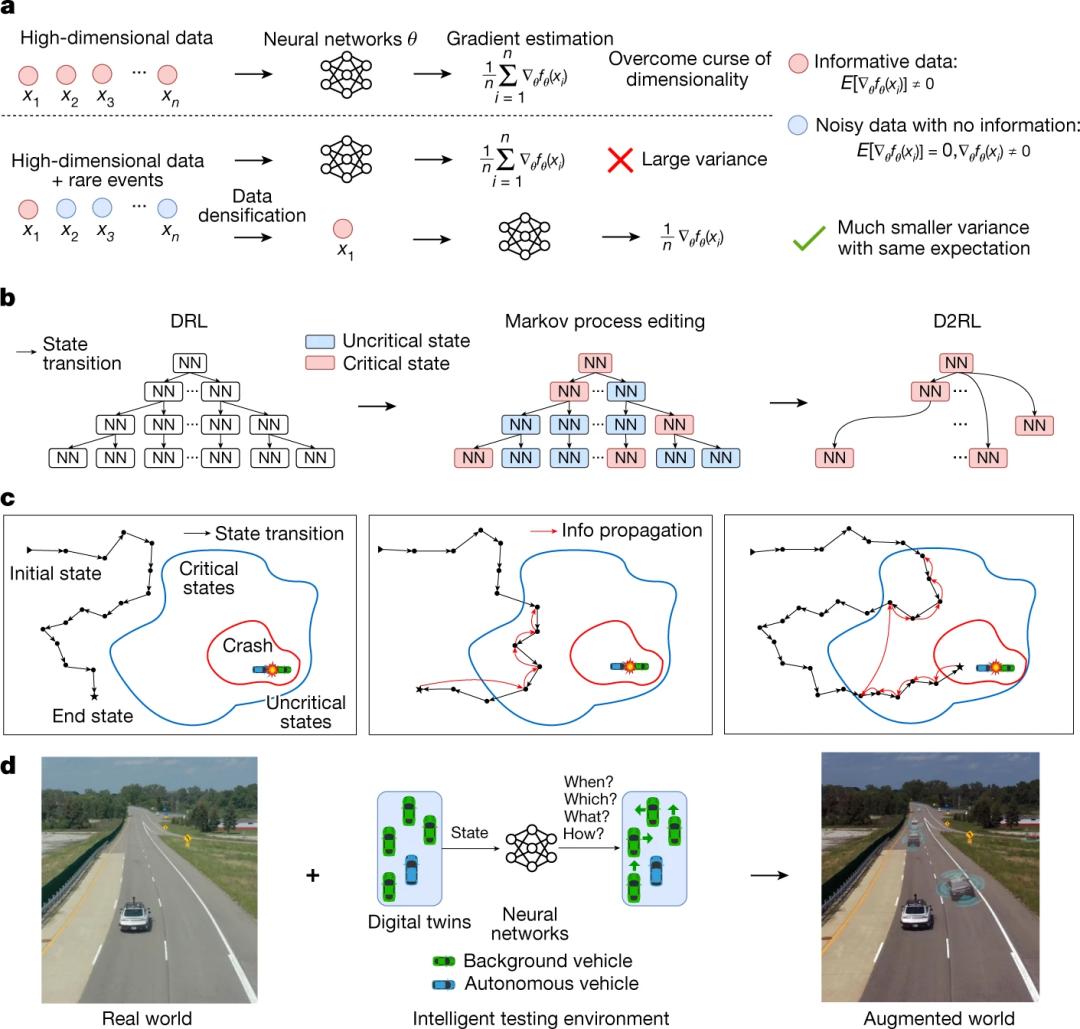
图1. 使用密集学习方法验证安全关键型AI。
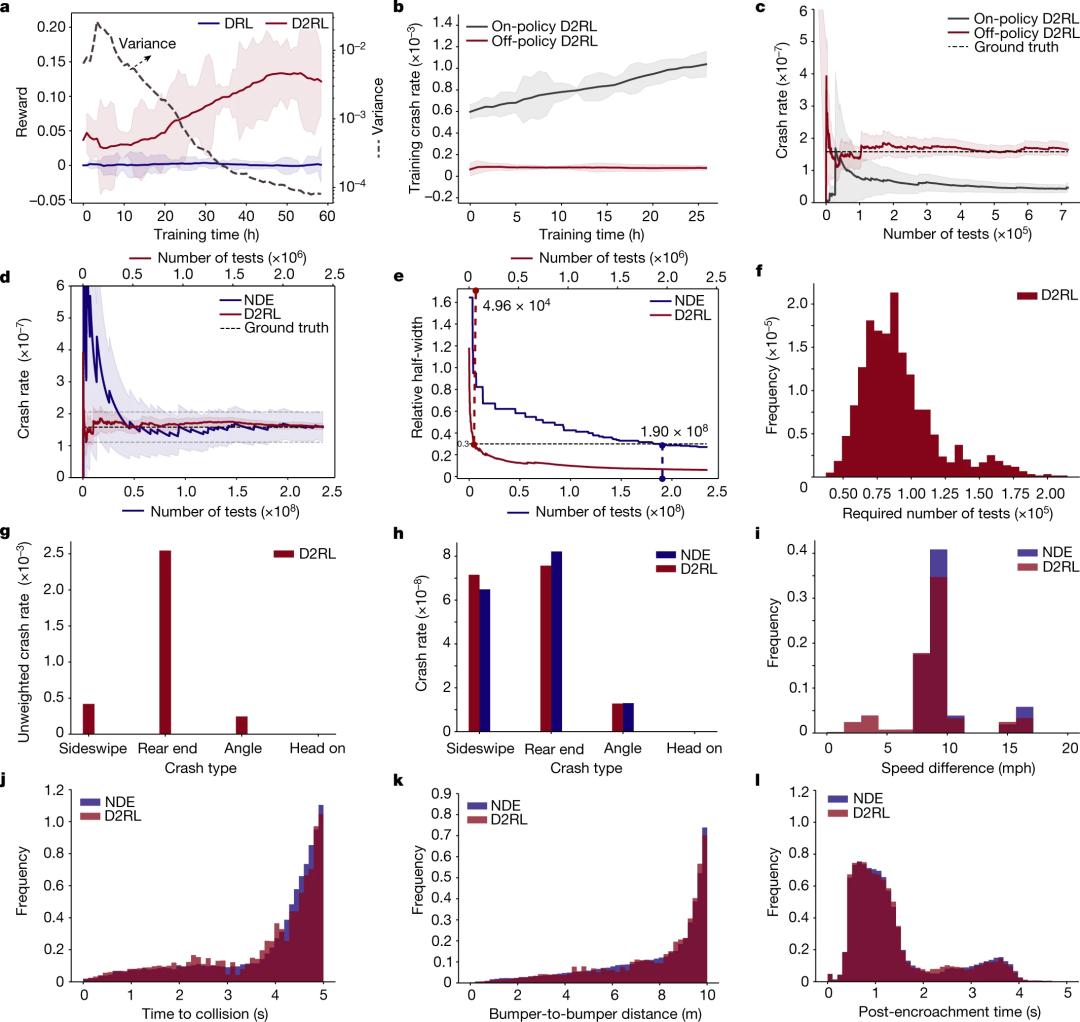
图2. 基于D2RL的智能测试环境的性能评估。
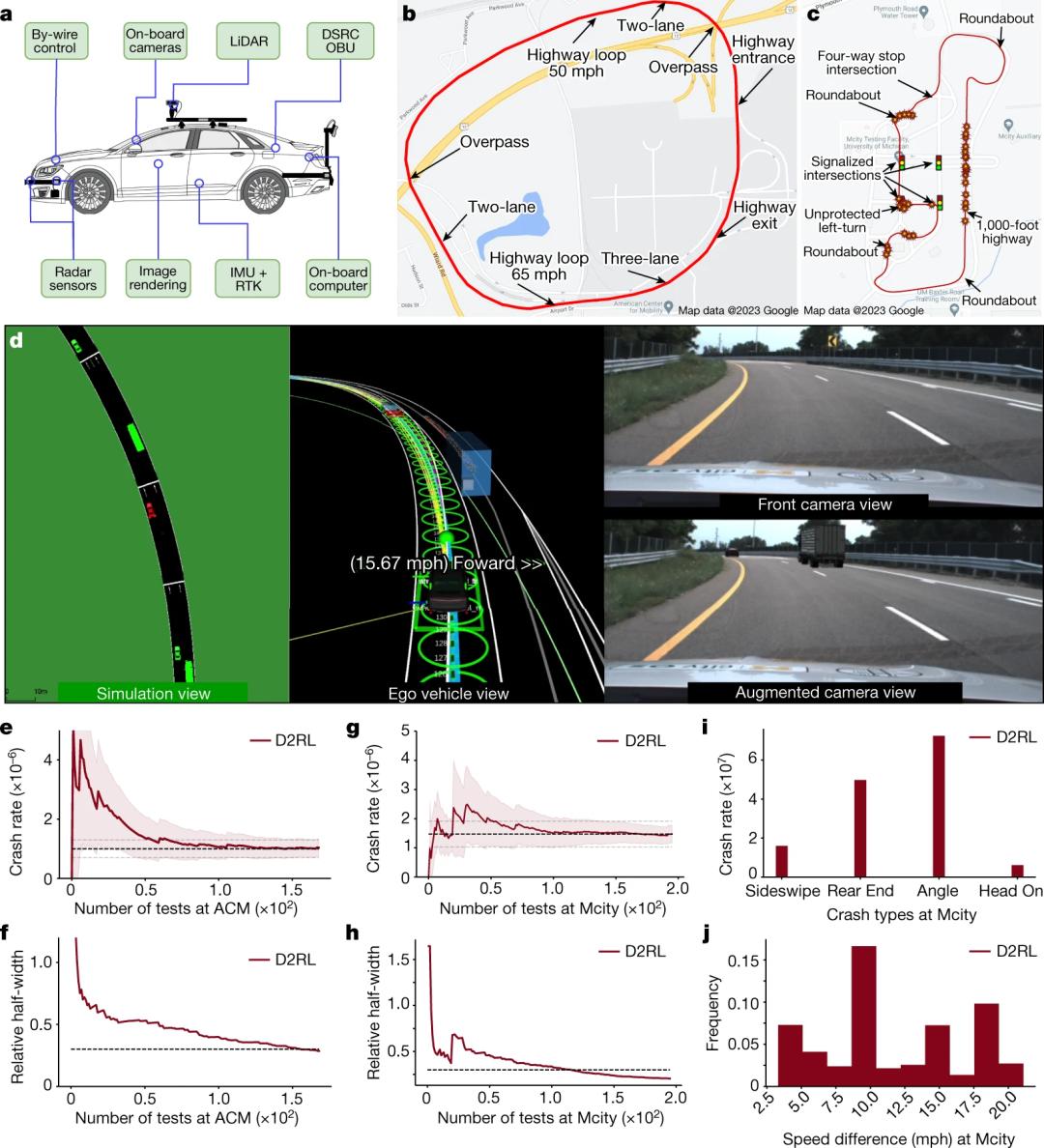
图3. 在物理测试轨道上进行真实世界自动驾驶汽车的测试实验。
原标题:《Nature 封面:自动驾驶车辆安全验证的密集强化学习》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

