- +1
光学精密工程·封面 | 光纤传感:穿刺针形状动态跟踪
▍研究现状
穿刺活检是癌症诊断的金标准,但手术过程的不可见性及穿刺针-组织交互作用引起的针体形变等因素,导致医生徒手穿刺操作难度大、准确性低,穿刺针无法精准到达病灶靶点甚至损伤周围重要组织。
近年来,穿刺机器人技术迅速发展,因具有稳定性高、可视化、自动化等特点,在经皮穿刺手术中表现出巨大潜力。穿刺机器人可通过术前路径规划避开重要组织,并融合医学成像或光定位导航技术实现术中针尖位置的实时跟踪。
然而,基于医学图像的穿刺针跟踪方法在形状监测实时性、准确性及其与医疗器械的兼容性等方面存在较大局限,影响了穿刺机器人在手术过程中自主避障及靶点操作的精准性。
因此,探究新的穿刺针形状感知方法,为手术机器人自主/主从穿刺提供实时准确的形状信息反馈,对于减轻医疗人员的手术压力,提高穿刺手术的安全性与成功率有着重大意义。
▍关键技术突破或解决问题描述
针对这一应用需求,近期武汉理工大学李天梁教授团队在《光学 精密工程》(EI、Scopus收录,中文核心期刊,《仪器仪表领域高质量科技期刊分级目录》和《光学和光学工程领域高质量科技期刊分级目录》“T1级”期刊)上发表了题为“光纤光栅与人工智能融合的形状自感知穿刺针”的封面文章。
2023年第2期封面
▍空分/波分混合复用的光纤光栅形状自感知穿刺针构型
本研究充分发挥光纤传感器抗电磁干扰、生物兼容及易于分布式测量等优势,针对穿刺活检术中穿刺针实时位置跟踪难题,设计了一种光纤光栅形状自感知穿刺针,其具体结构如图1所示,构建了光纤光栅空分/波分混合复用传感网络,实现穿刺针多点位变形信息分布式感知。

图1:形状自感知智能穿刺针结构示意图
▍基于BP神经网络的穿刺针三维形态实时精准重构模型
针对目前术中穿刺针三维形状监测方法存在的实时性、准确性不足等问题,本研究设计并搭建了光纤光栅形状自感知穿刺针标定实验系统,构建了神经网络数据集,仿真分析神经网络模型结构参量对其输出性能的影响规律,确定了基于BP神经网络的穿刺针三维形态实时精准重构最优构型,如图2(a)所示,测试样本输出结果分析如图2(b)所示,形状误差最大值为0.90mm,弯曲方向角最大误差为5.03°。为进一步验证模型的实时输出性能,搭建了动态性能验证实验平台,如图3所示,针尖处重构相对误差小于0.84 mm,弯曲方向角最大误差为1.02°。上述结果表明本次研究构建的神经网络模型具有较好的形状重构精度和速度。
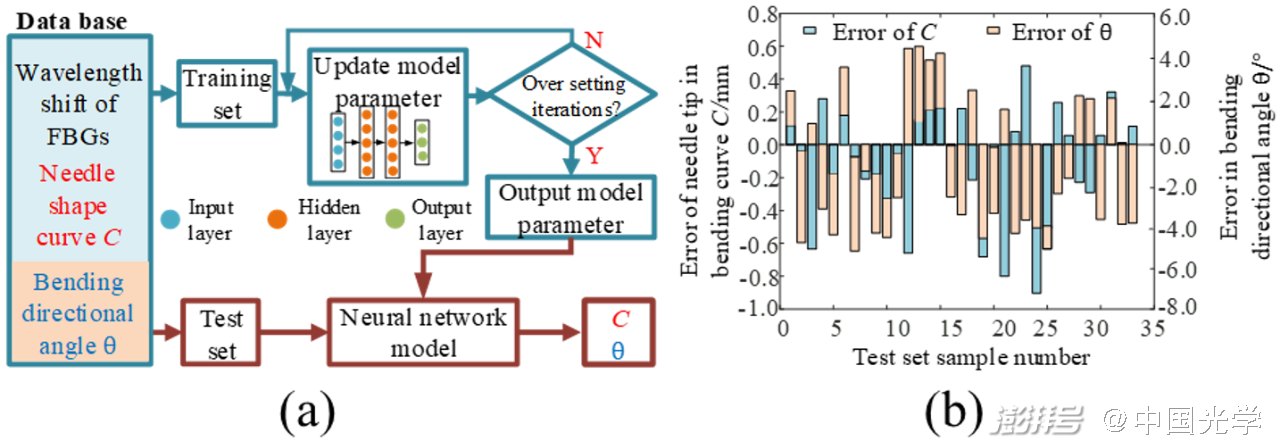
图2:基于BP神经网络的穿刺针三维形态实时精准重构模型

图3:动态性能验证实验平台及其实验结果分析
▍应用前景
该研究集合了光纤传感与神经网络的优势,实现了术中穿刺针三维形态信息的实时精准获取,在手术机器人自主穿刺/主从操作过程中针体形状感知与调控方面具有广阔的应用前景,为实现穿刺机器人智能化、高效化和数字化提供了一种新方法。
| 论文信息 |
李天梁,宋珍珍,陈发银等.光纤光栅与人工智能融合的形状自感知穿刺针[J].光学精密工程,2023,31(02):160-167. DOI:10.37188/OPE.20233102.0160.
https://ope.lightpublishing.cn/thesis/65/33378376/zh/
| 团队负责人简介 |

李天梁,武汉理工大学教授、博士生导师,入选湖北省海外高层次创新人才、湖北省“楚天学者计划”。IEEE Senior member,机械工程学会高级会员。聚焦于先进光纤传感技术、医疗机器人、机械装备动态监测等方面的研究。主持国家重点研发计划课题、国家自然科学基金(青年,面上)、湖北省重点研发计划、中国电子学会-腾讯Robotics X犀牛鸟等项目。在 Nat. Commun.、Adv. Intell. Syst.、IEEE-ASME. T. Mech.、《机械工程学报》等高质量期刊与学术会议上发表论文60余篇,其中第一作/通讯作者SCI论文35篇。指导学生获第四届中国研究生机器人创新设计大赛全国三等奖、第十七届中国研究生电子设计竞赛全国二等奖。
| 团队介绍 |

武汉理工大学李天梁教授团队聚焦于复杂机电装备运行状态光纤复合感知与动态监测技术及其应用方面的研究,主要包括适应严苛条件的极限化参数光纤传感器设计与制备、多参数光纤复合感知与动态解耦测量、融合光纤分布感知的智能医疗机器人与穿戴式医疗设备研发等,承担过国家重点研发课题、国家自然科学基金、湖北省重点研发计划等项目。
▍参考资料
1. 王汉萍,张力,梁智勇. 正确看待细胞病理学在肺癌诊断中的意义[J].中华病理学杂志,2013, 42(11): 726-728.
2. KOETHE Y, XU S, VELUSAMY G, et al. Accuracy and efficacy of percutaneous biopsy and ablation using robotic assistance under computed tomography guidance: a phantom study[J]. European Radiology, 2014, 24(3): 723-730.
3. 孔祥战.颅颌面穿刺诊疗手术机器人关键技术研究[D]. 北京:北京理工大学,2015.
4. 赵士元,崔继文,陈勐勐. 光纤形状传感技术综述[J]. 光学 精密工程,2020, 28(1):10-29.
5. 张贯一. 锁骨下静脉穿刺机器人及穿刺力模型研究[D]. 哈尔滨:哈尔滨理工大学,2019.
6. LI M, LI G, GONENC B, et al. Towards human-controlled, real-time shape sensing based flexible needle steering for MRI-guided percutaneous therapies[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2017, 13(2): e1762.
7. 李勐. 穿刺手术机器人穿刺针-软组织交互机理、规划控制及感知技术研究[D]. 北京: 北京理工大学,2017.
8. HENKEN K R, DANKELMAN J, VAN DEN DOBBELSTEEN J J, et al. Error analysis of FBG-based shape sensors for medical needle tracking[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(5): 1523-1531.
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

