- +1
转动系,想说懂你不容易
以下文章来源于小熊慢慢说 ,作者小熊君
 小熊慢慢说.
小熊慢慢说.数理科哲,慢慢说呗 ^_^
我们知道,牛顿力学成立于惯性系,若碰到非惯性系问题,牛顿力学将会失效。如果非要让牛顿定律在非惯性系下奏效,须特别引入惯性力的概念,这可以使牛顿定律保持形式不变。带来的好处是,在解决各种非惯性系问题时,我们仍然可以套用惯性系中已经形成的各种方法、技巧和基本思路。
非惯性系可为两种——加速平动系和转动系。对加速平动系,我相信凭大家聪明的脑袋瓜子,弄懂它应该没什么问题。
 可是对转动系,弄懂它的难度就大一些。它包含的情形多种多样,推导时有很多细节要点,与刚体力学还有着千丝万缕的联系,由转动系带来的各种效应——傅科摆、落体偏东、河水对河道两岸冲刷的差异等等——也并非三两句话就能讲明白。转动系啊,想说懂你不容易。
可是对转动系,弄懂它的难度就大一些。它包含的情形多种多样,推导时有很多细节要点,与刚体力学还有着千丝万缕的联系,由转动系带来的各种效应——傅科摆、落体偏东、河水对河道两岸冲刷的差异等等——也并非三两句话就能讲明白。转动系啊,想说懂你不容易。近日,我对转动系问题做了深入的主题阅读,翻阅和对比了梁昆淼、周衍柏、金尚年、David Tong、赵凯华、漆安慎等行家里手的力学和理论力学教材。越深入越感到,这些学者仿佛就在我身边,他们用温暖的大手拉着我,促膝长谈。他们从不同视角,以不同方式,向我讲述物理学中的严谨态度和精妙推理。这次主题阅读对我理解转动系的全貌,梳理个中细节、建立逻辑链条的帮助很大。
但是,在阅读中我也隐约察觉到他们的些许无奈——他们出于读者群、教材定位、叙述逻辑等的考量,不得已放弃了若干想说又不能细说的东西。概括来说就是:为考虑读者的接受能力,他们往往采用先从简单的转动情形入手,然后逐步深入的写法,又常在某些微妙而又重要的细节上一笔带过,令初学者常有似懂非懂之感。
在本文中,我将尝试换个叙述逻辑,直接从最一般的转动系问题入手,获得质点在非惯性系下的动力学表达。在这个过程中,我将着重凸显其中不可忽略的微妙细节,呈现完整的逻辑链条。
我们启程吧。
 质点的转动系问题分类
质点的转动系问题分类如果参考系
相对惯性系
转动,我们可以用角速度
表示这一转动。
的数值表示旋转的快慢,它的指向反映旋转的方向。对转动的讨论一般分两种:平面的定轴转动和空间的定点转动。
首先,让我们对质点的转动系问题做个分类,以便了解将要做什么。
观察下图,如果让你根据转动系的状态,对质点的运动情形做分类,你该如何分呢?
 可以想见,质点的转动系情形是非常多样的,从简单到复杂,从特殊到一般,可作如下分类:
可以想见,质点的转动系情形是非常多样的,从简单到复杂,从特殊到一般,可作如下分类:情形1:质点
相对转动系
保持静止;转动系
相对惯性系
作匀速定轴转动;
情形2:质点
相对转动系
作匀速直线运动;转动系
相对惯性系
作匀速定轴转动;
情形3:质点
相对转动系
作变速运动;转动系
相对惯性系
作匀速定轴转动;
情形4:质点
相对转动系
作变速运动;转动系
相对惯性系
作变速定轴转动;
情形5:质点
相对转动系
作变速运动;转动系
相对惯性系
作空间定点转动;
情形6:质点
相对转动系
作变速运动;转动系
相对惯性系
作空间定点转动,且含加速平动;
看起来好多啊,难道我们要从1到6一个一个讨论下去吗?
放心,我不会这么做的。一来比较繁琐,二来不具备一般性。由于第5种情况天然地包含前4种,前4种无非是第5种情况在特定条件下的特例,所以,我们直接讨论第5种情况,然后逐步增加限制条件,就能自然而然地得到前4种情形的结果。
有人可能会问了,直接从情形5出发,会不会太难呢?其实,大可不必担心哈,因为这个难不过是推导时写的字母较多,思考的要点却是清晰和明确的。之所以从情形5开始,是因为它能直接呈现那些我们最容易忽略的推导细节,更利于我们对转动问题建立完整的认识。
磨刀不误砍柴工。在正式讨论之前,我们有必要先做两个准备:一是讨论无限小转动,二是讨论矢量在不同参考系下的表示与求导。
其实,名为准备,实为推导中的关键细节,把这两个准备弄清楚了,转动系下的动力学表示便迎刃而解。
关键准备-无限小转动
为什么要讨论无限小转动?
请大家先思考一个问题,我们是怎么定义瞬时速度的?
我们是这么做的:先定义了平均速度
,然后将平均速度在时间
时的极限定义为瞬时速度
。在这顿操作中,我们其实并不关心有限的时间
,而是希望这个
越小越好。
我们要讨论转动系问题,描述转动快慢的物理量是角速度。那么,我们又是怎么认识角速度的呢?
在中学学习圆周运动时,角速度的定义式为
,到了大学我们又了解到,为描述旋转的方向,需要用右手螺旋定则给
加个方向,把
变成矢量。在讨论匀速定轴转动时,这其实没什么大问题。因为匀速定轴转动中,瞬时角速度始终与平均角速度相等,使得我们并不需要关心角速度的大小和指向的变化,也就不涉及角速度的瞬时性。
然而,当涉及转动系的定点转动时,对角速度的这点认识是不够的。由于角速度的大小或指向均可变化,我们不得不去关心角速度的瞬时性。因此,也就有必要区分有限转动和无限小转动。只有在讨论无限小转动时,才能给出角速度的精确定义,从而赋予它严格的矢量性。
另一方面,线速度和角速度的关系
是讨论转动问题的一个重要内容,我们也需要把他由定轴转动推广到更一般的空间转动中去。这也只能通过对无限小转动的讨论来实现。
关于有限转动和无限小转动,其实有个矢量对易律的知识点,蛮有意思。为避免冲淡主题,暂且不表,感兴趣的朋友可阅读周衍柏第三版《理论力学教程》118页的论述。
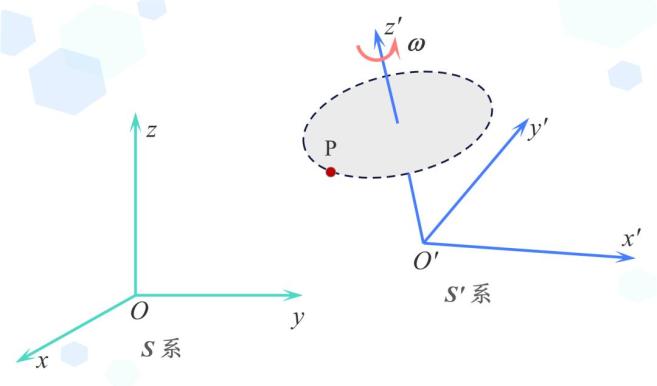
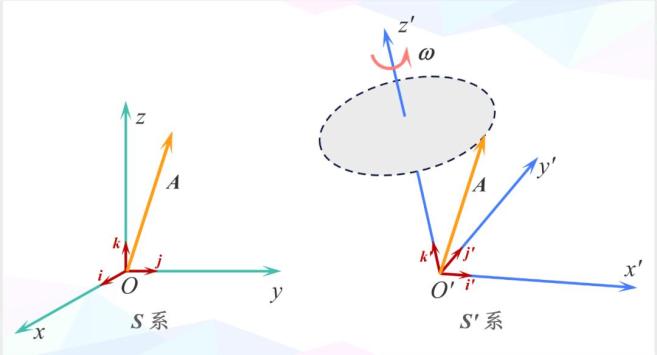
讨论无限小转动
如图所示,在参考系
中建立直角坐标系
;在参考系
中,建立直角坐标系
。令参考系
为惯性系,让参考系
相对
系以角速度
转动,瞬时转轴为
轴,令
轴与
轴重合。
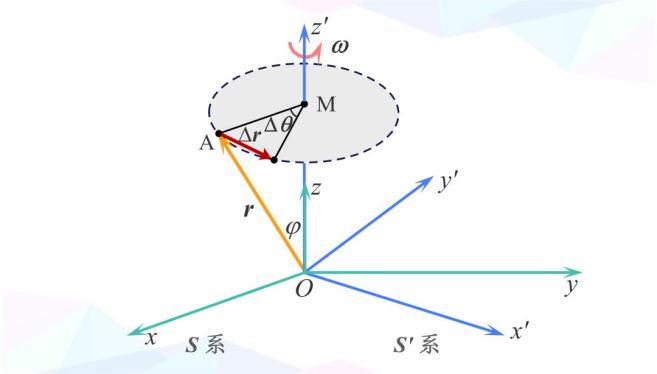 接下来,我们借用刚体力学的思路,讨论转动系的无限小转动。
接下来,我们借用刚体力学的思路,讨论转动系的无限小转动。在极短时间
内,令转动系
相对惯性系
发生一微小的转动。为描述这一微小转动,我们定义粗体
为角位移,它将同时干两件事:一是利用其数值
描述转动的角度大小,二是利用其指向描述转动时转轴的指向(即
方向,用右手螺旋定则判断旋转方向)。
在转动系
中任选一固定点
,转动前其相对惯性系的位矢为
。当转动系
相对惯性系
发生一微小的
转动时,
点将相对惯性系
同步发生一段微小位移
,要注意的是,由于
是无限小量,那么
也是无限小量,此时
必与
和
构成的平面垂直。且有以下关系成立
用叉乘表达即有
对上式两边分别除以
并取极限有
等式左边恰好就是线速度的定义式
,类似的,我们把等号右端的第一部分定义为瞬时角速度
,即
因此,
式可被改写为
至此,讨论无限小转动给我们带来了两个成果:
一是精确定义了角速度
。这里的
不仅可以发生数值变化,也可以发生指向的变化。因此它不仅适用于定轴转动,更适用于一般的空间转动。
二是得到了线速度
与角速度
的关系
。这个关系对于我们接下来讨论转动系下的矢量求导问题很重要。要特别提醒的是,此式中的三个物理量均是相对惯性系
而言的,时刻记住这一点,这很重要。
关键准备-矢量求导与参考系
为什么要讨论不同参考系下的矢量求导呢?
在讨论转动系和惯性系下质点的位矢、速度和加速度的关系时,我们会有很多矢量的求导运算(含单位矢量的求导),并且要经常在转动系和惯性系间来回跳跃。如果不明确矢量以及矢量求导与参考系和坐标系的依赖关系,就容易张冠李戴,造成推导过程中的理解偏差。
在展开接下来的讨论之前,请严格区分参考系和坐标系,当我在说参考系时,并没有引入对坐标系的任何描述。
我们先讨论矢量与参考系和坐标系的关系。
矢量与参考系和坐标系的关系
我们知道,要想研究一个物体的运动必须选择参考系,而选择参考系的实质是确定参考原点。一旦选定了参考原点,描述物体位置的位置矢量就被确定下来。由于对矢量作平移时不改变矢量本身,所以在对多个矢量进行加法、点乘、叉乘运算时,可以让矢量脱离参考系,使其在空间中任意平行移动。换句话说,一个指向和大小确定的矢量是不依赖于具体的参考系的。
既然如此,我们就可以把在一个参考系中确定好的矢量平行移动到另一个参考系去考察、去描述,而不改变矢量本身。记住这一点,这很重要。
那么,在参考系中如何对一个确定的矢量进行具体地考察和描述呢?这就得引入坐标系。
在参考系
中,我们可以建立直角坐标系
,和三个单位矢量
;在参考系
中,也可以建立直角坐标系
,和三个单位矢量
。
如下图所示。对同一个位置矢量
,我们可以在参考系
中用坐标系
描述它,也可以把它平行移动到参考系
中用坐标系
描述,所得的坐标自然是不同的。虽然坐标不同,但由于描述的是同一个矢量,所以矢量的长度是不变的。
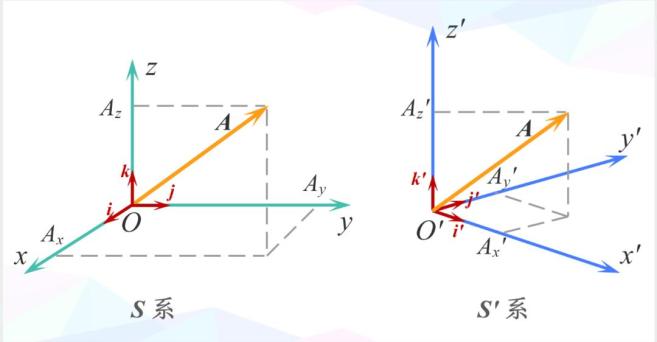 即有
即有其中记号“
”和“
”分别表示“处于参考系
下”和“处于参考系
下”。
要注意的是,虽然
的记法不同,但是由于描述的是同一个矢量,所以它们的含义相同。即:
有了这个认识之后,我们就可以讨论惯性系和转动系下对同一矢量的求导了。
在惯性系和转动系中对同一矢量求导
我问大家一个问题,对矢量求导和对标量求导有什么不同呢?
不同点在于,对标量求导关心的是数值变化,而矢量求导不仅关心数值变化,还关心指向的变化。
数值的变化好说,如何描述指向的变化呢?
这时候单位矢量的重要性就凸显出来了,对矢量方向的描述必须依赖单位矢量。所以,要想考虑对矢量方向的求导,就不得不先解决单位矢量在不同参考系下的求导。
对单位矢量在不同参考系下求导
和
分别是固定于惯性系
和转动系
的三个恒矢量,显然它们在
系和
系中对时间的导数为零,即
其中,下标“
”表示“处于惯性系(inertial system)下”;下标“
”表示“处于转动系(rotating frame)下”。另外,在经典时空观下我们默认
。
那么,作为转动系
下的单位矢量
,如果在惯性系
下求导,会有何种表现呢?
在惯性系下对
求导的过程已经在无限小转动中已经被讨论过了。也就是公式(5),所以
讨论完单位矢量的求导后,就可以分析对任意矢量
的求导了。注意此时的矢量
不是恒定矢量,而是关于时间的函数。
转动系与惯性系下对任意矢量
求导
在转动系
中,矢量
对时间求导可以轻松写出,利用
式,有
在推导中,为什么第二个等号的前三项没有加“
”记号呢?可以看到,前三项均是对标量的求导乘以单位矢量,而对标量函数求导不需要考虑参考系问题。
 接着看惯性系中的情况。
接着看惯性系中的情况。在惯性系
中,矢量
对时间求导可以有两种计算方式。
第一种是按照矢量
在惯性系
中原有的坐标来表达,即按下式进行
结合
式有
这种写法对我们求瞬时速度的坐标分量有帮助,但这并不能帮我们建立惯性系与转动系在求导上的联系。
为达这一目的,就有了第二种计算方式——在惯性系下对矢量
按如下形式求导
暂停片刻:可能有人会问:形式“
”是转动系
中的表述,怎么能用它求矢量
在惯性系
下的导数呢?
做个解释:这就是我为什么刚才要花篇幅讨论“矢量与参考系和坐标系的关系”的原因。对同一个矢量,无论把它挪到哪个参考系或坐标系下,它总是原来的那个矢量,发生改变的是描述它的坐标分量和单位矢量。
所以,无论是
,还是
,它们表达的其实是同一个东西。
另一方面,单位矢量
在惯性系
下并非恒定矢量,它们的指向会发生变化。所以,在惯性系
下,对
形式表达的矢量
求导时,对它方向变化快慢的描述,也是由
在惯性系
中的导数来体现的。
这是一个非常微妙的细节,很多教材在推导时常采用简化情境和符号的方式避开了这一点。若不深究,初学者很难发现这个细节。
了解了这一点,我们继续推导矢量
在惯性系下的第二种求导方式。即
在推导中,为什么第二个等号的前三项没有加“
”记号呢?可以看到,前三项均是对标量的求导乘以单位矢量,而对标量函数求导不需要考虑参考系问题。
我们还看到,前三项分别跟着单位向量分别是
,因此这三项恰好为矢量
的三个分量分别在转动系中的求导,即
式。
经过整理,
式最终可被写成
我们终于得到了一个对讨论转动问题极为重要的关系。它表明:对任意矢量
在惯性系
中求导,等于其在转动系
中求导,加上转动系相对惯性系的角速度
叉乘这一矢量
。
也就说,对任意矢量,其在惯性系下的导数与其转动系下的导数,应该服从以下结构:
特别地,为接下来讨论质点在转动系中的运动学和动力学做准备,我们把角速度矢量
代入
式,得到如下重要关系
OK,到此为止,我们的准备工作终于做完了^_^
接下来就可以进入转动非惯性系下的运动学和动力学问题了。
对运动学的讨论,目的是要建立质点在惯性系和非惯性系下的位矢、速度、加速度关系;
对动力学的讨论,目的是要分析质点在非惯性系下的动力学方程应该如何表达。而要想展开动力学讨论,就不得不先进行运动学分析,讨论连接动力学与运动学的桥梁——加速度。
运动学分析
质点在惯性系与转动系下的位矢关系
如图所示,设有一质点
在转动系
中运动,其位置矢量为
,速度为
,加速度为
。它们都是时间的函数。在惯性系
中,质点的位置矢量为
,速度为
,加速度为
,它们也是时间的函数。
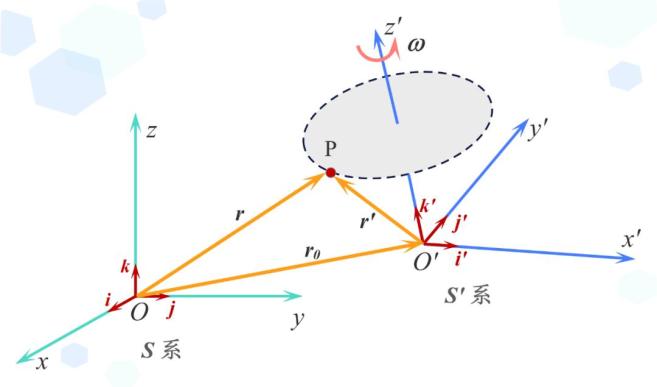 对位置矢量,直接由图知
对位置矢量,直接由图知接下来重点看速度和加速度。
质点在惯性系与转动系下的速度关系
在惯性系和转动系下,质点的速度分别为
为建立
和
的联系,我们对
换种求导方式,也就是把
代入
式,有
由于转动系不发生平动,则
为恒矢量,所以上式第二项为零。将
式代入
式,得到
这是质点在惯性系下的速度与其转动系下的速度关系:质点在惯性系下的绝对速度
,等于质点在转动系下的速度
,加上转动系的角速度
叉乘位置矢量
,加上转动系的平动速度
。
其中的
可从物理意义上理解为“质点由于转动系转动而产生的牵连速度”。
惯性系与转动系下的加速度关系
依葫芦画瓢。在惯性系和转动系下,质点的加速度分别为
为建立
和
的联系,我们对
换种求导方式,也就是把
代入
式,有
为得到具体结果,将
式代入
式,则有
考虑到
式,上式可被改写为
这就是质点在惯性系下的加速度与其转动系下的加速度关系。
——妈呀,这也太长了吧!别的公式都是越化越简单,这货怎生得又丑又长啊。
——得,长是长了点儿,但这丑嘛······倒不见得。甭看这几个叉乘项长得寒碜,它们可都是有身份的“人”。为帮助理解,接下来我们逐步加入限制条件,在不同的情形下凸显它们的物理意义。
情形1:转动系作匀速定轴转动,质点相对转动系静止。在此条件下可知
,
,
,那么
由右手螺旋定则可知,
正好指向质点的旋转中心,这正是质点因转动系旋转而获得的向心加速度。
情形2:转动系作匀速定轴转动,质点相对转动系作匀速直线运动。在此条件下可知
,
,
,那么
可以看出,情形2相比情形1多出了一个
,这是质点相对转动系的速度
因受到转动系的角速度
牵连而产生的加速度,我们称之为科里奥利加速度,即
。
情形3:转动系作匀速定轴转动,质点相对转动系作变速运动。在此条件下可知
,
,
,那么
可以看出,情形3相比情形2多出了一个
,这不难理解。这就是质点相对转动系的加速度
;
情形4&情形5:转动系作变速定轴转动或定点转动,质点相对转动系作变速运动。在此条件下可知
,
,
,那么
可以看出,情形4相比情形3多出了一个
,这是质点由于转动系的角速度
的变化而牵连产生的加速度。不难想到,当转动系的转动加快时,质点切向速度会随之增大,所以此项实为切向加速度。
(至于情形6,是在情形5的基础上附带一个加速平动,教材告诉我们考虑矢量合成即可。那么,是否可以在无限小转动中附加一个平动,从头推导出一个与矢量合成相同的结论呢?略微尝试后感觉不太简单,以后再试试)
动力学分析
有了上述一系列结论,我们就可以讨论质点在非惯性系下的动力学表达了。
对质点
,设其受到其它质点的相互作用力的合力为
。在惯性系下,由牛顿第二定律有
这就是质点在惯性系下的动力学方程。很简单,中学就学过。
接下来看质点在转动系下的动力学表达。
首先质点的受力。由于质点受到的相互作用力是实实在在发生的,不会因更改参考系而变化,所以转动系下观测的相互作用力仍然为
;再看质量,在不考虑相对论效应的时候,物体的质量是个常量,仍然为
;在转动系下测量的加速度为
。假如我们坚持要写牛顿第二定律,那么公式应该为
。
然而,由运动学讨论的
式可知,由于
,所以
。表明在转动系下,牛顿第二定律并不成立,这就是我们称转动系为非惯性系的原因。
为了让牛顿第二定律在转动系下依然形式不变,我们可以采用一个折中的办法,就是引入假想的力——惯性力。具体怎么做呢?把
式代入到惯性系的动力学方程中,得到
将其变形,得
观察上式,我们如果把中括号的部分理解为假想的力,称之为惯性力。那么,等号左右两边仍然是“力等于质量乘以加速度”的形式。即在非惯性系下,质点的动力学方程仍然符合牛顿第二定律的形式。在这个过程中,我们相当于扩大了力的概念,把力分为两种,一种是“两个物体间的相互作用力(简称牛顿力)”,另一种是由于考虑非惯性系问题而引入的“假想的力”。显然,惯性力是没有施力物体的,这是惯性力与牛顿力的不同点之一。
结合刚才对加速度的讨论,我们把惯性力中的三个部分分别取不同的名称。其中,
称为切向惯性力,
称为科里奥利力,
称为惯性离心力。
至此,质点在转动系中的动力学表达便完成了。
 做个总结 ^_^
做个总结 ^_^在本文中,为讨论转动系问题,我们先做了两个重要的准备。一个是通过讨论无限小转动,得出了角速度的精确定义,并且发现了联系线速度和角速度的重要关系式。二是重点讨论了矢量及其求导与参考系和坐标系的关系。
有了这两手准备之后,我们直接上手讨论转动系问题的情形5——质点
相对转动系
作变速运动;转动系
相对惯性系
作空间定点转动,得到了质点在这惯性系和转动系中的速度、加速度的一般表示,以及动力学方程。
留个“作业”
若想进一步了解转动系在生活中产生的各种效应的原因,欢迎阅读结尾的参考资料。这里附上两个有趣的视频。
第一个视频是傅科摆现象。按常识,单摆的运动应该在一个固定的竖直平面上,而傅科摆现象告诉我们,单摆摆动时会受到某个微弱的侧向力,使得单摆摆动平面会有缓慢的偏移。原因是什么呢?欢迎在评论区留言^_^
第二个视频是在转动系中抛球出现偏离现象。在地面上向伙伴扔球,一接一个准。可是,若两人均在转动系中,互仍小球还会一接一个准吗?欢迎在评论区留言^_^
参考资料
《理论力学教程》第三版,周衍柏编,高等教育出版社;
《普通物理学教程 力学 上册》第四版,梁昆淼编,高等教育出版社;
《力学 下册》第四版,梁昆淼著,高等教育出版社;
《理论力学》第二版,金尚年著;
《Letures on Dynamics and Relativity》,David Tong;
《新概念普通物理学教程 力学》第二版,赵凯华 罗蔚茵著,高等教育出版社;
《理论力学 物理类》,中国大学MOOC网站,任延宇主讲。
END
 更多精彩文章请点击下面“蓝字”标题查看:
更多精彩文章请点击下面“蓝字”标题查看:对麦克斯韦方程组拓展的评论王青教授:深入理解“拓展的麦克斯韦方程组”——2.0版王青教授:理解王中林院士“拓展的麦克斯韦方程组”“碰瓷”麦克斯韦:伽利略协变和洛伦兹协变电磁场论趣谈热点:运动介质洛伦兹协变电磁理论2021年《物理与工程》优秀论文、优秀审稿专家、优秀青年学者名单王青教授:源自苏格拉底的问题驱动式教育——在互动中共同学习和成长读后感:教育中的现实和远方王青教授:昨晚(6月9日),清华电动力学期末考试朱邦芬院士:“减负”误区及我国科学教育面临的挑战《物理与工程》2021年第5期目录乐永康:新冠肺炎疫情防控下美国物理实验教学及中美情况对比顾牡:对于重新制定的《非物理类理工学科大学物理课程教学基本要求》的认识和体会朱邦芬院士:从基础科学班到清华学堂物理班朱邦芬院士:对培养一流拔尖创新人才的思考李学潜教授:物理是一种文化李学潜教授:如何帮助物理系学生迈过从高三到大一这个坎穆良柱:物理课程思政教育的核心是科学认知能力培养穆良柱:什么是物理及物理文化?穆良柱:什么是ETA物理认知模型穆良柱:什么是ETA物理教学法吴国祯教授:我的国外研究生经历印象——应清华大学物理系“基科班20年·学堂班10年纪念活动”而写
陈佳洱,赵凯华,王殖东:面向21世纪,急待重建我国的工科物理教育王亚愚教授:清华物理系本科人才培养理念与实践葛惟昆教授:关于中外人才培养的几点思考安宇教授:为什么传统的课堂讲授模式需要改变安宇教授:其实教学就是积累的过程刘玉鑫教授:关于本科生物理基础课程教学和教材编著的一些思考沈乾若:重创理科教育的美加课程改革Henderson C:美国研究基金支持下的物理教育研究及其对高等物理教育的影响《物理与工程》期刊是专注于物理教育教学研究的学术期刊,是中国科技核心期刊,1981年创刊,欢迎踊跃投稿,期刊投审稿采编平台:
http://gkwl.cbpt.cnki.net
欢迎关注
《物理与工程》微信公众号
原标题:《转动系,想说懂你不容易》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2026 上海东方报业有限公司

