- +1
首战告捷!哈工大联合研制的灵巧“小臂”亮相“问天”
近日,哈尔滨工业大学机电学院刘宏院士、谢宗武教授团队和中科院长光所联合研制的小机械臂随问天实验舱上行,成功完成一系列在轨功能、性能测试,各项指标均表现优异,达到了预期效果,为空间机械臂后续在轨应用奠定了坚实的基础。
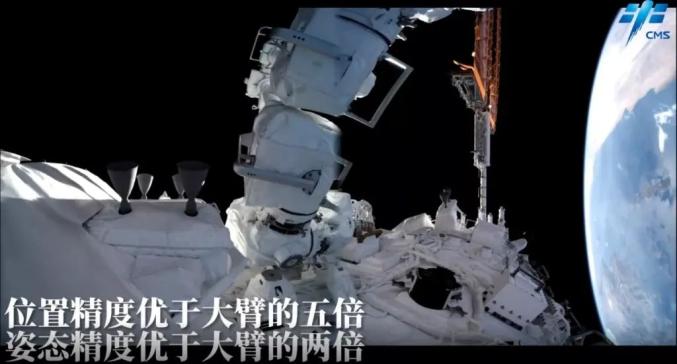
作为空间站“明星”部件之一,相比于核心舱配备的大机械臂,小机械臂更加精巧,采用了7自由度对称构型,两端各有一个末端作用器;其臂长近6米,有效操作空间约5米,最大负载3吨;可单独使用,也可与大机械臂形成组合机械臂;支持航天员出舱活动、舱外状态检查、舱外货物转移及安装、舱外维护维修、载荷照料、光学设施维护等6项应用任务。

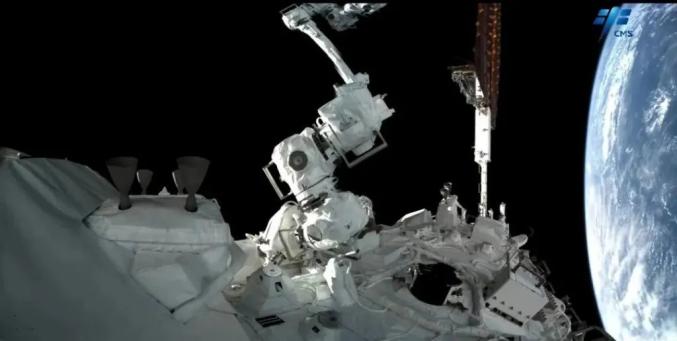
问天实验舱舱外安装的小机械臂

科研人员正在检测小机械臂
对比大臂优势
小机械臂首次随舱段上行并进行了功能、性能在轨确认,测试内容有哪些?对此,该校相关人员进行了科普讲解。
1.火工品解锁
小机械臂在轨测试,首先要做的是进行火工品解锁。解锁后,小机械臂便可以加电开始进行各项测试。航天火工装置是以引燃火药、引爆炸药或做机械功的一次性使用的元器件和装置的总称。
2.产品自检
小机械臂进行解锁后,小机械臂在轨测试逐步展开。科研人员首先对机械臂的各项产品进行检查,检查内容主要包括控制器状态确认、关节检查、末端检查等。
3.单关节展开
单关节展开是对小机械臂的各个关节进行测试,确认关节能够正常展开。在太空完成各项精细操作、巡检等任务需要小机械臂有足够的覆盖面积。为此,需要检测小机械臂上的单关节能否正常展开工作。这就好比人的关节,关节能活动自如,人才能顺利行走。

小机械臂关节展开
4.爬行动作确认
小机械臂在关节展开后,就会在舱壁上进行爬行动作确认,这是机械臂进行舱外作业的重要基础。机械臂爬行看似容易,实则有着许多技术困难。机械臂爬行过程中所对接的适配器长时间暴露在空间环境效应下,会面临老化和退化的风险。为此,科研人员会设计一个自动闭合装置,以保护舱壁上机械臂对接的适配器,但同时也增加了机械臂爬行的难度,所以需要确认其闭合装置可正常运行后,再进行爬行任务。
小机械臂前往下一适配器

小机械臂适配器“脚印”
5.脱离基座
在小机械臂末端对接舱壁上的适配器后,小机械臂的另一个末端需要从基座脱离,这是小机械臂完整迈出的“第一步”。如同走路需要一步一个脚印,当小机械臂的第二个末端脱离基座后,小机械臂才真正意义上实现舱壁“行走”。小机械臂能否从基座顺利脱离,决定着它开展后续任务的能力。
6.太阳翼、出舱口巡检与载荷靶标标定
在小机械臂爬行过程中,会经过舱壁上4个小机械臂适配器,每个适配器就像是小机械臂的“脚印”,小机械臂在途经所有“脚印”后,才能确保每一个适配器点位都得到测试验证。在这个过程中,小机械臂会同时进行太阳翼、出舱口巡检和载荷靶标标定工作,在一切确认无误后,小机械臂会回到原来的位置,形成长期存储构型。

小机械臂巡检载荷适配器
7.联合测试
地面科研人员对小机械臂进行测试确认后,开展航天员、小机械臂、小机械臂操作台的“三方联合测试”,航天员会在操作台面板对小机械臂进行操作测试。这是神舟十四号乘组首次控制、操作小机械臂。

组合机械臂
后续,科研人员还将展开大机械臂在轨测试,测试完成后,大小机械臂将为后续出舱等任务提供支持。空间站配置的大小两个机械臂将实现1+1>2的实用功能,满足空间站任务的需求。
原标题:《首战告捷!哈工大联合研制的灵巧“小臂”亮相“问天”》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

