- +1
Science Advances:液晶态可编程执行器
说明 | 本文由论文作者(课题组)投稿
工业社会随处可见的转动平动转换在自然界为何如此稀缺?
转动/平动转换是人造机械系统中的典型范例。例如,发动机活塞的往复平动驱动车轮转动,进而推动车辆行驶。然而,这种经典的机械传动模式在自然界中却极为少见。唯一特例便是某些细菌利用H⁺、Na⁺的跨膜运动提供的动力驱动蛋白转子转动配合鞭毛形变来实现在水中的自由游动。这有点类似于发动机驱动的微型螺旋桨,不同之处除了分子马达外,传动系统也是由分子组装结构来担当的。该模式未曾在高等生物或自然材料中被发现。假如能在活性自组装体系中模拟上述刺激响应行为,将有望实现无接触驱动和非机械啮合、精准可编程的传动,进而涌现出机器人、装配线、分拣装置等全新的微型智能装备。
是什么使得浮在液晶中的微球在光照下排起阵型集体起舞?
动物通过神经信号刺激肌肉响应做出各种动作。刺激变形的液晶弹性体被广泛用来模拟翅膀的扇动,爬虫的蠕动,肌肉的伸缩和关节的弯曲。这些运动来源于刺激下材料不同侧非对称的收缩、膨胀或扭曲形变。向具有螺旋结构特征的胆甾相液晶中掺入光响应手性开关,光致分子异构化或开闭环反应会致使体系螺旋扭曲能变化,进而驱动螺旋结构解旋或增旋。将该材料悬涂成膜后,光照可驱动结构整体演变并带动悬浮粒子转动。这提供了一种完美的光驱动分子马达候选体系,但是模拟组装微结构“啮合” 实现自由传动仍是一项挑战。
近日,南京大学胡伟教授、陆延青教授团队在手性液晶中人为诱导分子组装构建精密螺旋结构,并通过光照刺激结构整体增旋/解旋,模拟了细菌利用鞭毛螺旋式推进自身在水中前行的运动模式,实现了光照自驱动和分子自组装结构传动的可编程执行器,并验证了对负载微球的定制化二维运动编程。

相关成果以 Programmable self-propelling actuators enabled by a dynamic helical medium 为题,于2021年8月6日在线发表在Science Advances。
研究团队通过写入特定光偏振信息预设基板取向图案,操控胆甾相液晶螺旋超结构,创造性地将螺旋结构光照解旋/增旋与弧形织构的横向平移结合在一起,从而实现了高效的转动-平动转换。通过合理预设取向图案,他们成功验证了悬浮微球的会聚、发散、定点聚集和轨道公转等运动模式。因材料组成并未发生任何变化,上述可编程执行器功能的实现全赖特殊组装结构的引入。

图 1. 可编程执行器实现微球 (A) 会聚,(B) 发散,(C) 定点聚集,(D) 轨道公转。从左往右四列分别展示了不同的基板配向设定,微球散布起始状态、移动过程和终态。比例尺50 μm
结构复杂性的提升如何赋予了材料新奇的属性?
胆甾相液晶悬涂到均匀配向的基板上时,贴近基板的液晶分子跟随配向层诱导取向,底部液晶自发形成螺旋结构且螺旋轴朝向基板法向,液晶沿螺旋轴旋转一周的距离称为螺距p。顶部空气界面诱导液晶垂直配向,上下对抗性的配向导致液晶薄膜顶部区域产生横向的周期性指向矢波动l,l通常数倍于p。这导致了一个与l相对映的相位延迟量波动,在偏光显微镜下呈现出周期性亮暗变化,形成一维光栅。光栅矢量方向取决于膜厚、体系手性和初始配向方向。其可以与表面配向方向呈任意夹角,且在光驱动过程中伴随螺旋结构解旋/增旋连续变化,光栅周期l也相应增大/缩小。
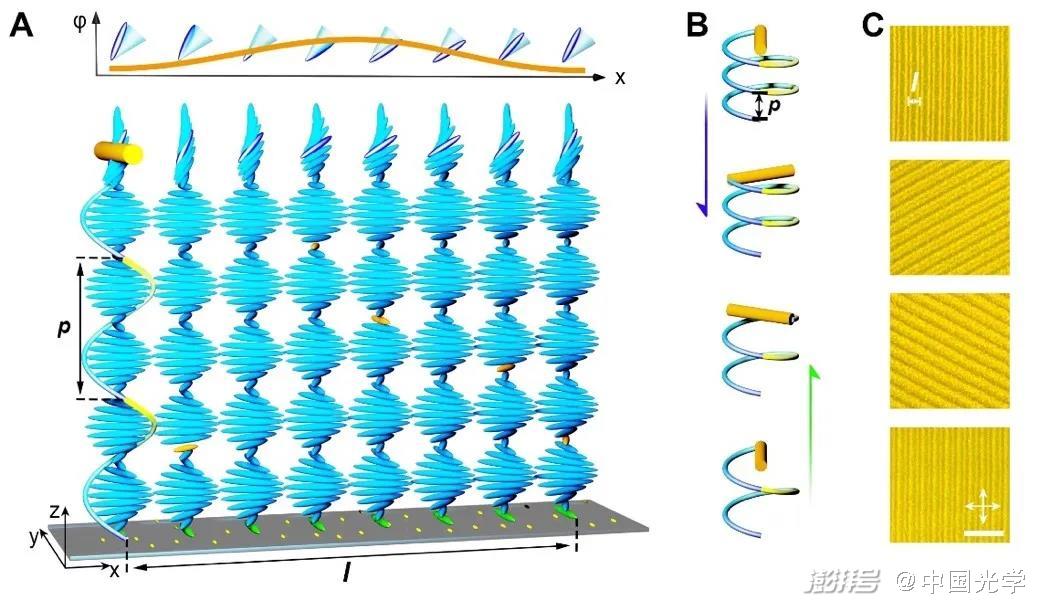
图 2. 均匀取向半开放胆甾相液晶薄膜 (A) 螺旋结构示意图及周期性相位变化,(B) 光驱动解旋过程及(C)显微织构变化。比例尺20 μm
当预设取向变为周期性Λ连续渐变时,对映表面取向周期性呈现展曲(S)和弯曲(B)分布,显微织构也相应弯曲变为弧形光栅织构。弧形光栅周期由取向周期Λ决定,弧型的宽为l。相邻弧形光栅区域会汇集大量的叉形缺陷。在蓝紫光驱动下,螺旋结构逆时针解旋、弧型宽度逐渐变大、弧形光栅织构内部结构的有序度逐渐变差。这可通过衍射图案的结构和强度变化得到验证。因为液晶只发生原位置转动,并不发生流动,这就等效为弧型光栅织构发生横向平移。而进一步研究表明,螺旋结构每解旋半个螺距,局域光栅条纹相应旋转180°,弧形光栅织构平移一个周期Λ。这就将螺旋结构光照解旋/增旋与弧形光栅织构的横向平移结合到了一起。另外,织构的平移方向可以通过改变取向图案的渐变旋转方向或辐照光波长来实现反转。

图 3. 弧形光栅织构的光驱动演变 (A) 图案化取向的螺旋超结构示意图,(B) 取向示意图,(C) 周期性拱形光栅织构,插图为刃型位错,(D) l与曝光时间的关系,(E) 衍射图案演变,(F) 弧形光栅织构的光驱动平移,(G) 水平位移Δx与解旋角度θ的关系。比例尺50 μm
除了光学各向异性外,液晶的粘弹性同样取决于指向矢分布情况。上述弧形光栅织构的横向平移必然带来弹性能周期势的横向平移,并相应产生一个横向的推力。喷洒直径3 μm的微球(具有弱切向锚定)到液晶表面之上。它们倾向于被临近弧形光栅间的刃型位错捕获,进而跟随光栅织构同步平动,实现横向输运。其运动轨迹具有出色的方向选择性,正交方向位移量的对比度在20以上。缺陷与微球的相互作用使得捕获微球有助于降低系统的自由能。利用势阱/粒子分布概率关系可以形象地说明缺陷对微球的捕获与携带机制。进一步受力分析证明体系弹性能变化是导致微球输运的直接驱动力。在15 μm/min的移动速率下,弹性变化所产生的驱动力为0.2 pN,精准平衡了流体粘度所导致的斯托克斯拉力。周期渐变的初始取向设定和对抗性的锚定条件使得精确测量或模拟液晶指向矢场变得极为困难。幸运的是,上述能量模型分析使得螺旋结构解旋/增旋与驱动微球平动的图像变得极为直观。纵使跳过指向矢场的分析讨论,亦可通过合理预设取向条件来精确编辑操控粒子的输运方向与轨迹。

图 4. 转动-平动转换 (A) 微球粒子单向输运,比例尺50 μm,(B) 横向Δx和纵向Δy位移与旋转角度θ的关系,(C) 光驱动微球输运的势能分析。
微纳粒子输运、分拣与装配,智能材料能走多远?
该研究中弧形光栅织构的平移反映的是体系内部液晶指向矢的集体重构与演变,叉形位错跟随织构平移并携带粒子平动,从而成功将螺旋结构解旋/增旋转化为负载粒子的正反向平动,完美匹配了前述细菌依托分子马达和分子组装啮合机构的自驱动、自传动的运动模式。平动轨迹与方向可通过预设取向结构实现定制化,这为可编程执行器的设计开发提供了一种全新的策略。驱动光功率密度约为100 μW/cm²,仅为普通光镊的1/500,大幅降低了样品发生光损伤的可能。该执行器适用于大批量粒子的并行输运,基于体系对粒子尺寸、形状和表面性质的敏感性,还可实现对粒子的分拣。结合时序和空间的分步多元外场控制,有望实现对粒子疏运的实时调和多材质的定点装配。因为缺陷态的拓扑保护,让具有鲁棒性的三维粒子疏运也值得期待。该工作可望激发功能材料和智能机器人的全新设计,在微纳智能制造、光流控、生物传感、片上诊疗等领域展现应用价值。
论文信息:
Ling-Ling Ma, Chao Liu, Sai-Bo Wu,et al. Programmable self-propelling actuators enabled by a dynamic helical medium. Sci. Adv. 2021, 7(32): eabh3505
南京大学为论文唯一单位,马玲玲副研究员和刘超硕士为共同第一作者,胡伟教授和陆延青教授为共同通讯作者。吴赛博、陈鹏副教授、陈全明、钱嘉欣、葛士军副研究员、武远航对本文亦有重要贡献。本研究受国家重点研发计划、国家自然科学基金、江苏省基金、中央高校基本科研业务费资助完成。
论文地址:
DOI: 10.1126/sciadv.abh3505
https://advances.sciencemag.org/content/7/32/eabh3505
编辑 | 赵阳
欢迎课题组投递成果宣传稿
转载/合作/课题组投稿,请加微信:447882024
带您每天读1篇文献!加入>Light读书会
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

