- +1
从月球到火星 | 详解星表机器人的前世今生
原创 做硬科普的 航空知识
之前,航知为大家介绍了空间站中的机器人(文章回顾:中国空间站的航天员还没去?太空机器人先行一步!),除了空间站上的机器人,还有一类太空机器人——星表机器人,也就是着陆于外星球表面可以自主或遥控开展移动、操作、科学作业的探测器。星表移动探测机器人可以有效减轻人类工作强度、保护人身安全以及代替人类完成恶劣环境下的科研探测工作。
SPACE
月面机器人
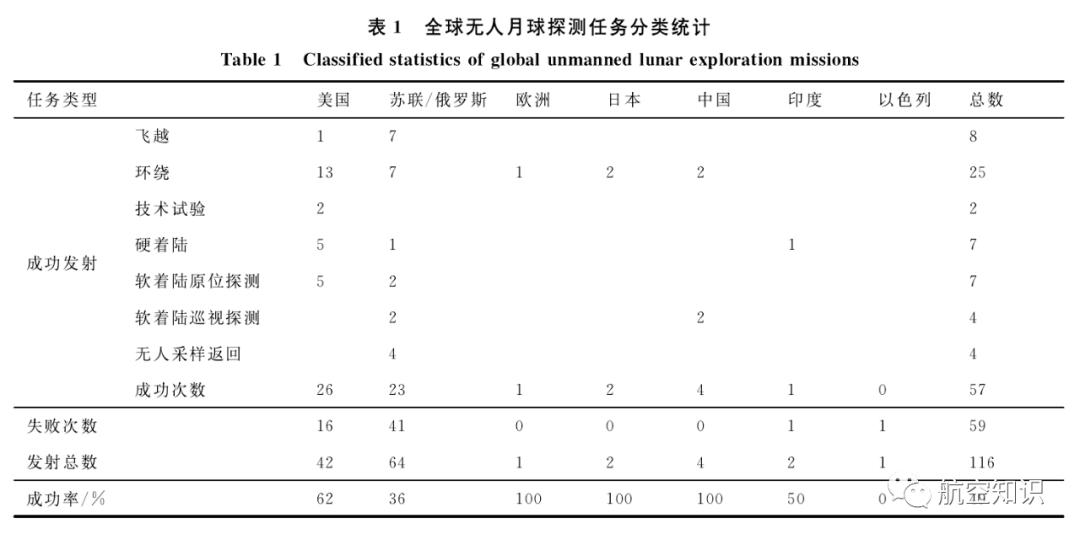
月球是地球唯一的天然卫星,是人类探索地球以外的必经之路。纵观全球各国的月球探测,美国和前苏联在冷战时投入最大,取得的成果也最多。目前,只有美国成功进行了6次载人月球探测,其余各国对月球的探测均为无人探测。截至2020年2月底,全世界共实施了116次无人月球探测任务,实现了月球飞越、环绕、着陆、巡视和采样返回探测。

图片来源:NASA
1970年,前苏联发射Luna 17探测器,其主要有效载荷为月球车1号Lunokhod 1。Lunokhod 1是历史上第一辆月球车,其主要任务为月面移动勘察和月面精细探测,重756 kg,长2.94 m、宽1.96 m,8轮独立驱动。月球车工作11个地球日,共行走10.54 km,实际运动速度为0.14 km/h,可登上30°斜坡,越过0.4 m高的障碍物和0.6 m的沟壑。
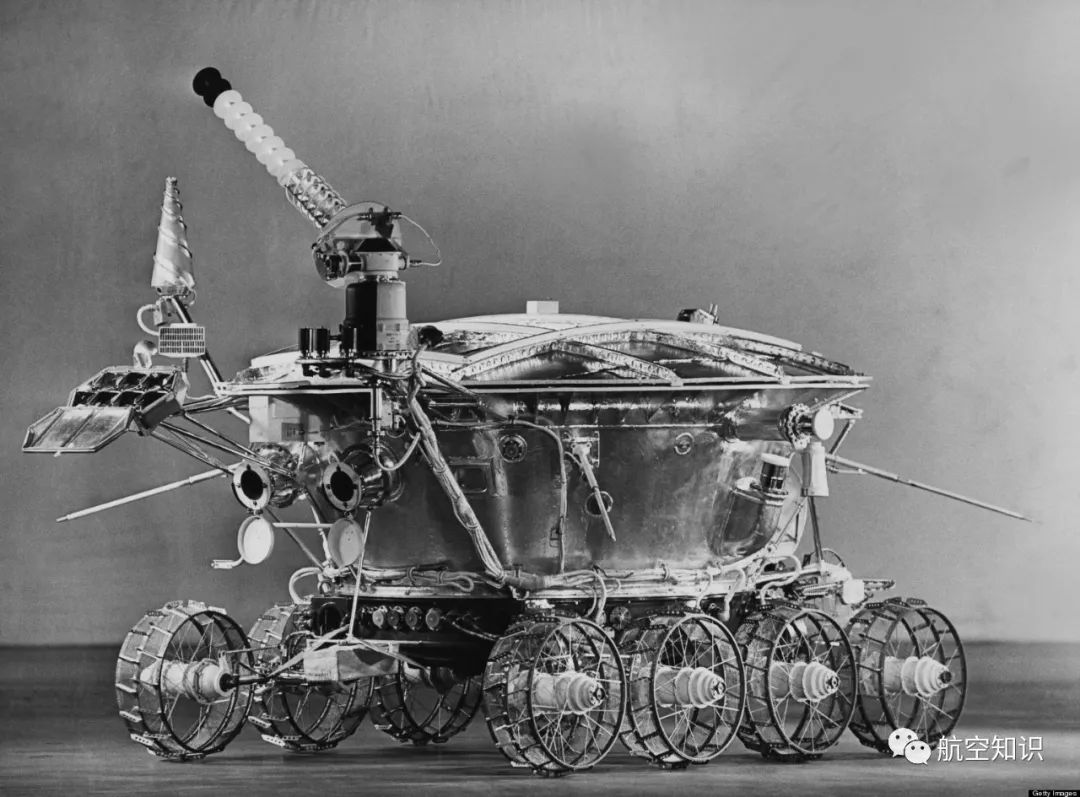
月球车一号
美国NASA的阿波罗月球车Lunar Rover Vehicle,分别搭载在Apollo 15 (LRV-1)、Apollo16(LRV-2)和Apollo17(LRV-3)上,也是唯一由宇航员驾驶的月球车。LRV车长为3.1m、轮距为1.83m,车轮直径0.82m,具备2名宇航员的承载能力。LRV发射时处于折叠状态,到月球表面后由宇航员手动安装展开。移动系统全轮驱动、独立转向,移动底盘采用四套扭杆式悬架系统,多个独立悬架通过扭杆弹簧和载荷平台固连。
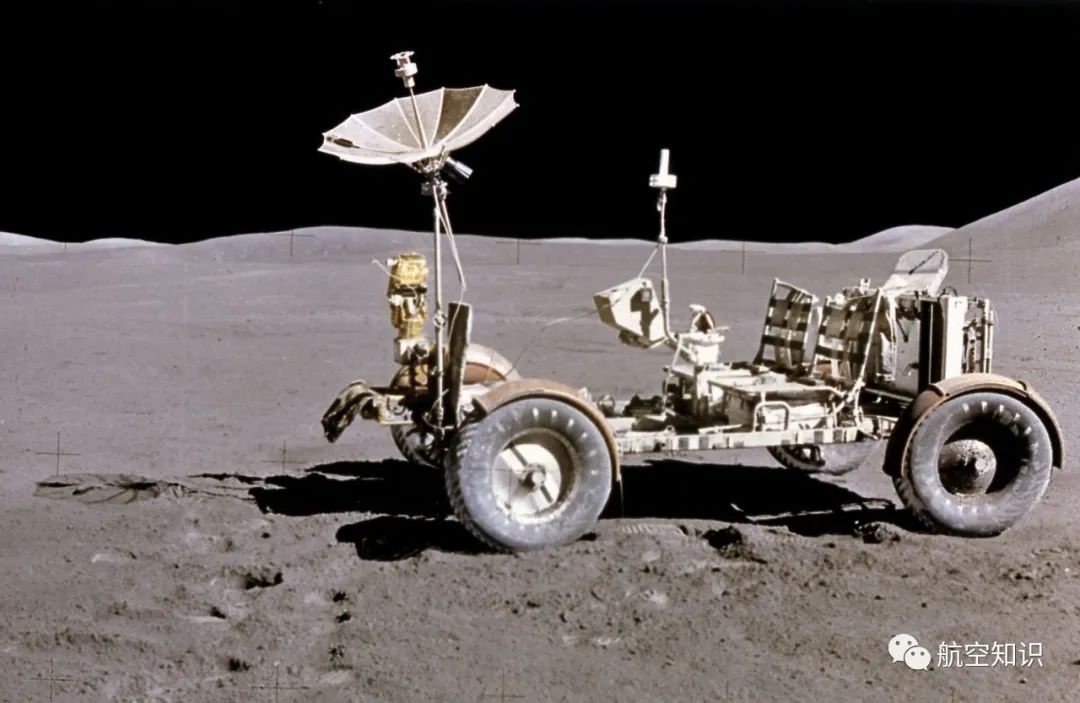
阿波罗月球车
2013年12月,中国嫦娥三号巡视器“玉兔号”成功落月并完成月面巡视探测任务。

玉兔号月面巡视器
2019年1月,嫦娥四号巡视器“玉兔二号”成功落月并实现月背原位探测和巡视勘察任务。月面巡视器包括移动、结构与机构、制导导航与控制、综合电子、电源、热控、测控数传和有效载荷共8个分系统,设计质量140 kg。移动分系统采用主副摇臂悬架方案,由车轮、摇臂和差动装置等组成,6个车轮采用独立驱动方式,并利用4个角轮实现转向,具备在月面前进、后退、转向、爬坡和越障能力。移动系统最大运动速度200m/h、爬坡角度30°、越障高度200 mm。“玉兔号”月面巡视探测器配置了3自由度机械臂,配置了全景相机、测月雷达、红外成像光谱仪、粒子激发X射线谱仪等科学载荷。
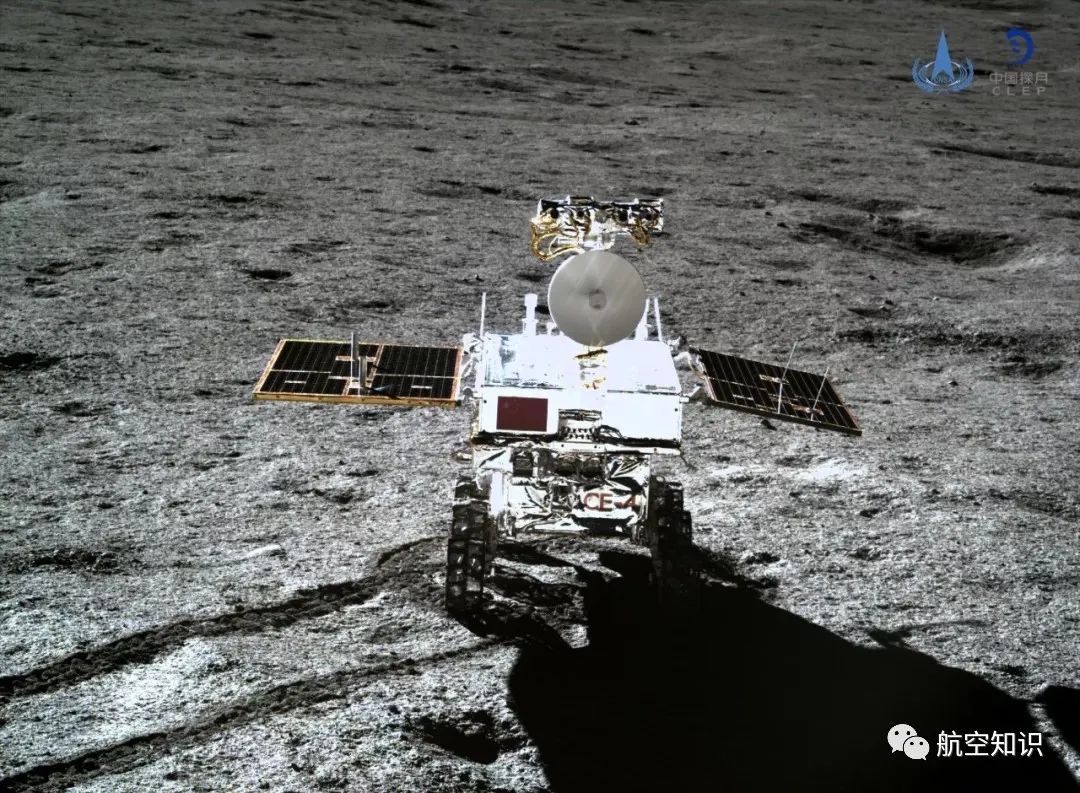
玉兔二号月面巡视器
“玉兔二号”不仅是人类首个在月球背面执行任务的月球探测机器人,而且也是人类在月面工作时间最长的月球车。截至2020年4月30日,“玉兔二号”已经在月球上度过了17个月昼(483天),累计行驶447.68 m。
SPACE
火星机器人
由于火星的自然条件与地球比较相似,从20世纪70年代开始,火星一直是人类深空探测的首选目标星球之一。美国和前苏联先后发射了自己的火星探测机器人,但前苏联的火星探测机器人在着陆后很快就失去了联系,只有美国发射的火星探测机器人成功着陆。
火星探测的平均成功率低于月球探测的平均成功率。其根本原因一方面是火星距离远,遥测遥控能力受限,导致探测器本身自主动作复杂;另外一方面是火星有稀薄的大气,对探测器的气动性能、耐热性能、敏捷性能等都提出了更高的要求。美国在火星探测机器人方面处于领先地位。
索杰纳(Sojourner)是“火星探路者”携带的火星巡视器,于1997年7月着陆在火星表面。索杰纳在“火星探路者”附近100 m的范围内进行了科学实验。索杰纳重10.5 kg,体积为660mm×480mm×300mm,采用6轮摇杆悬吊式结构,轮子直径130mm、轮宽60mm,设计速度最大10mm/s。角上的4个轮子有独立的驱动和控制能力。索杰纳工作50个火星日,搜集了火星表面环境、岩石、地貌结构等数据,完成了轮壤作用、导航试验及巡视器工程性能的验证。
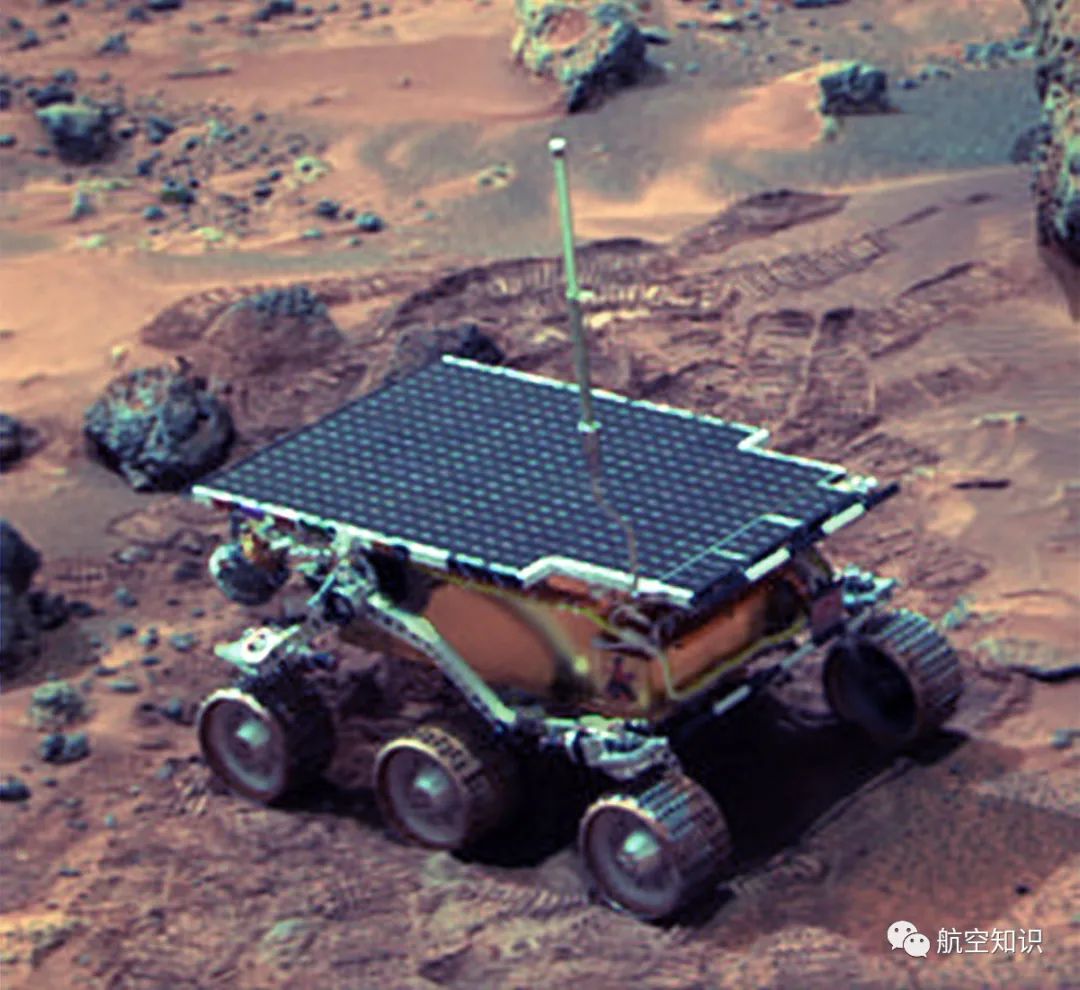
索杰纳号
“勇气号”(MER-A)与“机遇号”(MER-B)为一对孪生探测器,于2003年发射,2004年到达火星,科学目标和探测器结构相似。机遇号/勇气号高1.5 m、宽2.3 m、长1.6 m,其质量为180.1 kg。机遇号/勇气号继承了索杰纳六轮摇臂式结构,移动机构新增了可折叠的功能,使悬架能够收回到四面体着陆器中。MER在坚硬平直表面上的最大速度50 mm/s,实际运行速度10 mm/s。MER配置5自由度机械臂,其主要作用是部署各种设备仪器,并且安放在火星表面。机遇号在火星上工作了15年,行驶里程超过45.16 km,是目前人类在地球以外天体上行驶距离最远的探测机器人。
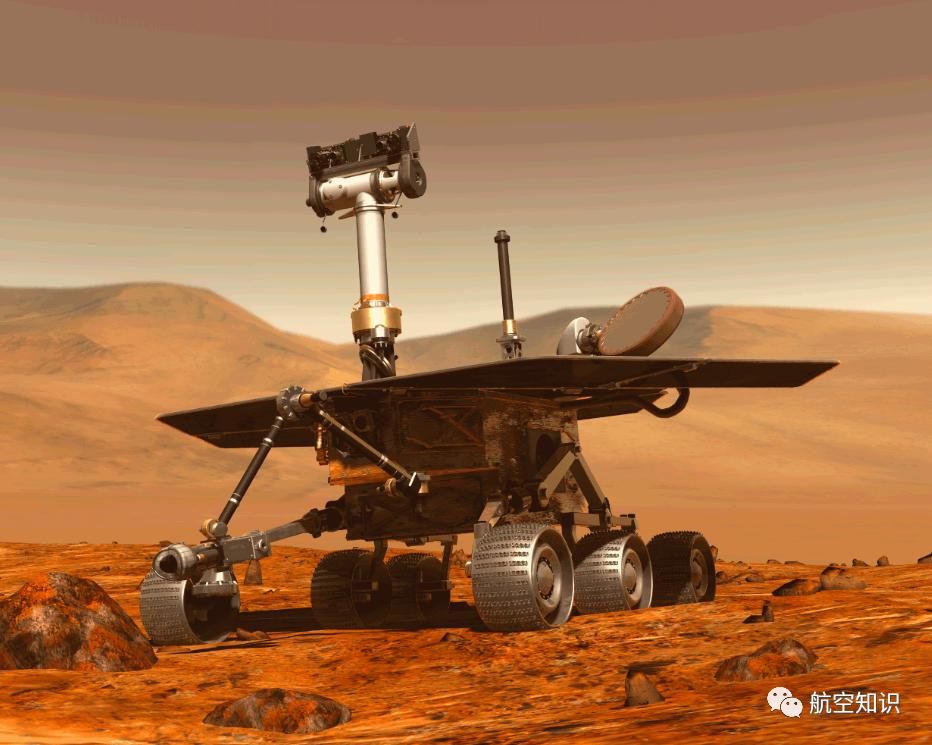
勇气号(机遇号)
2008年“凤凰号”Phoenix火星着陆器在火星着陆;其上的机械臂4自由度,展开长度2.4 m,可在-90 ~ -20℃的火星白昼工作,末端集成了挖掘铲、热量及逸出气体分析仪TEGA、电化学和电导率分析仪MECA。
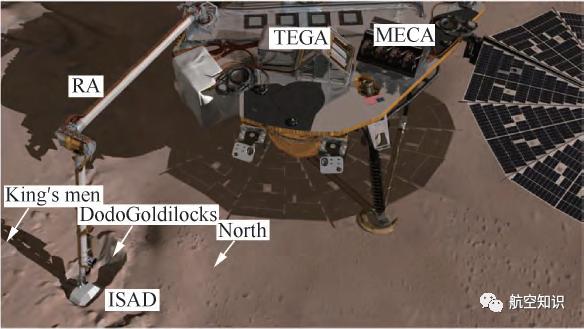
“凤凰号”着陆器及其机械臂
2018年,“洞察号”InSight火星着陆器顺利着陆,其机械臂基本继承了“凤凰号”的方案;“洞察号”用于火星内部探测活动的两个重要科学载荷火星地震仪SEIS及热流与物理性质探测包HP3,均由机械臂释放布置于火星表面。
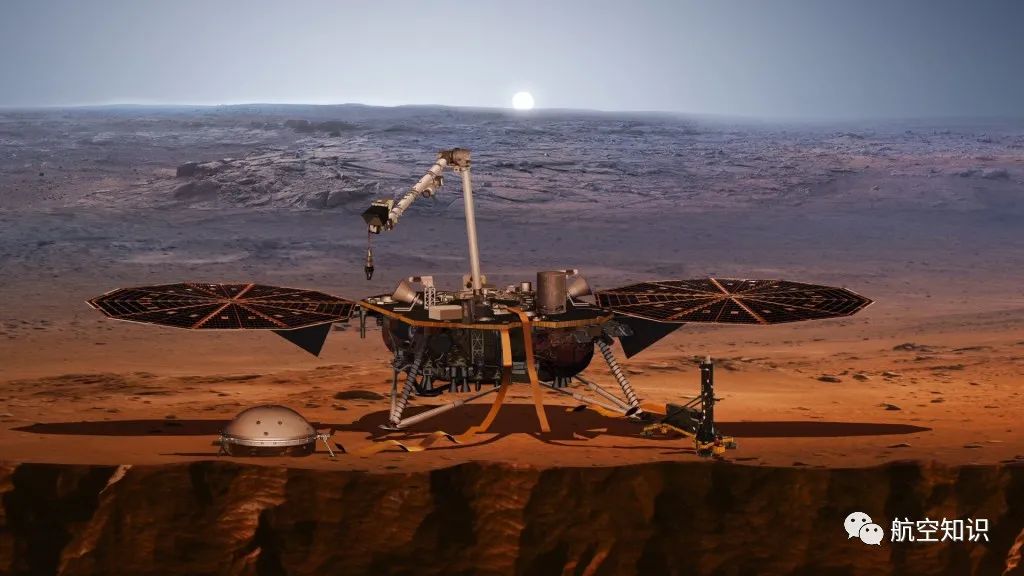
“洞察号”火星着陆器概念图
SPACE
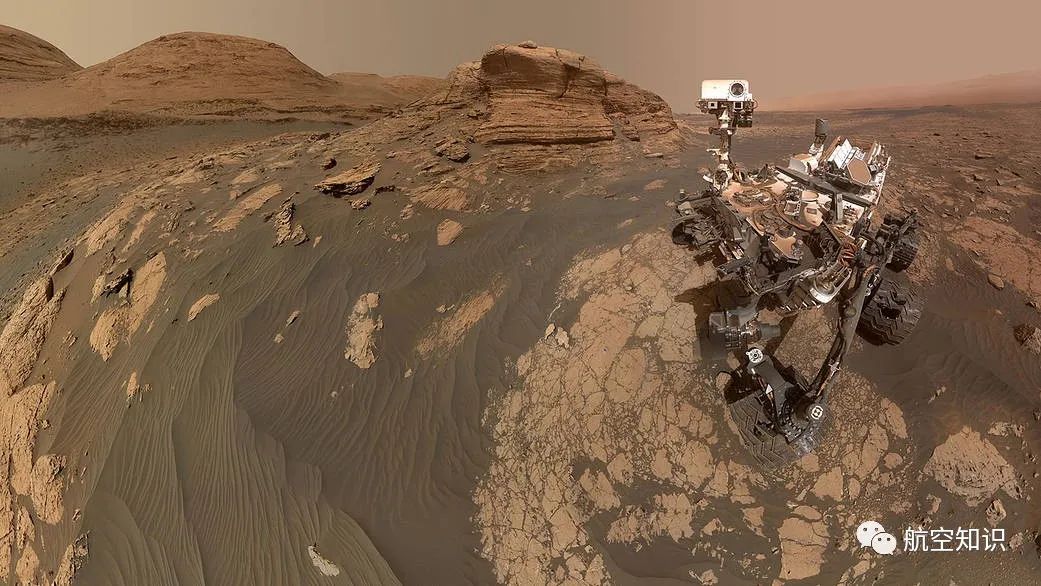
“好奇号”火星探测器
“好奇号”是NASA火星科学实验室(Mars Science Laboratory, MSL)的巡视探测器,于2011年11月发射,2012年到达火星表面。作为迄今为止最庞大、最复杂、最先进、最昂贵的火星探测器,好奇号的探测结果使人类对火星的认识发生了革命性变化。
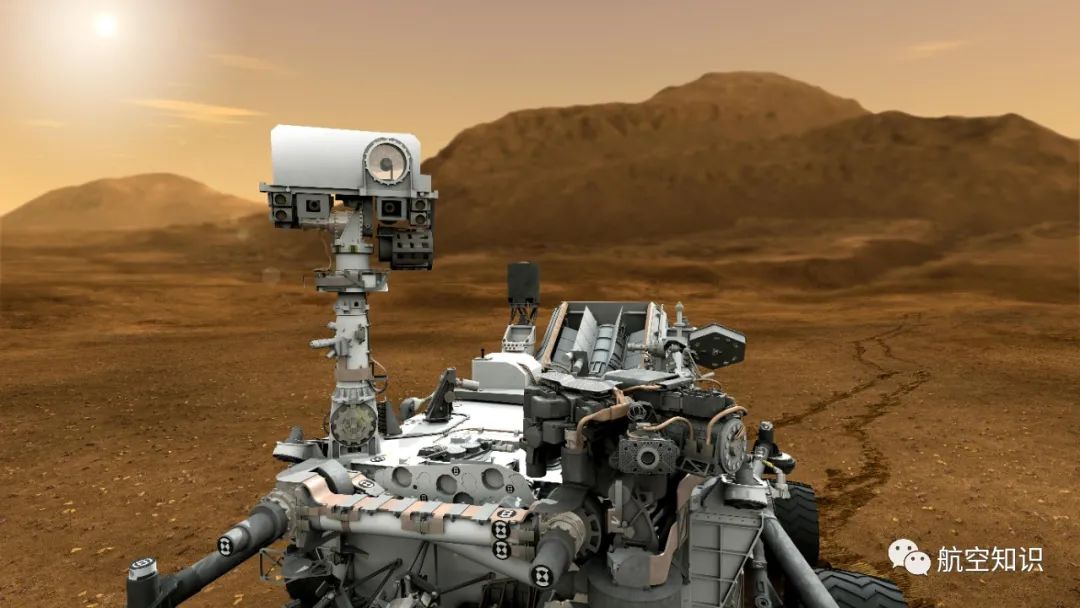
“好奇号”
好奇号为6轮布局,总质量899 kg,有效载荷总重84 kg,由移动分系统、结构与机构分系统、导航与控制分系统、综合电子分系统、电源分系统、热控分系统、测控数传分系统等组成,携带有11种有效载荷,开展火星环境、生命等方面的探测任务。
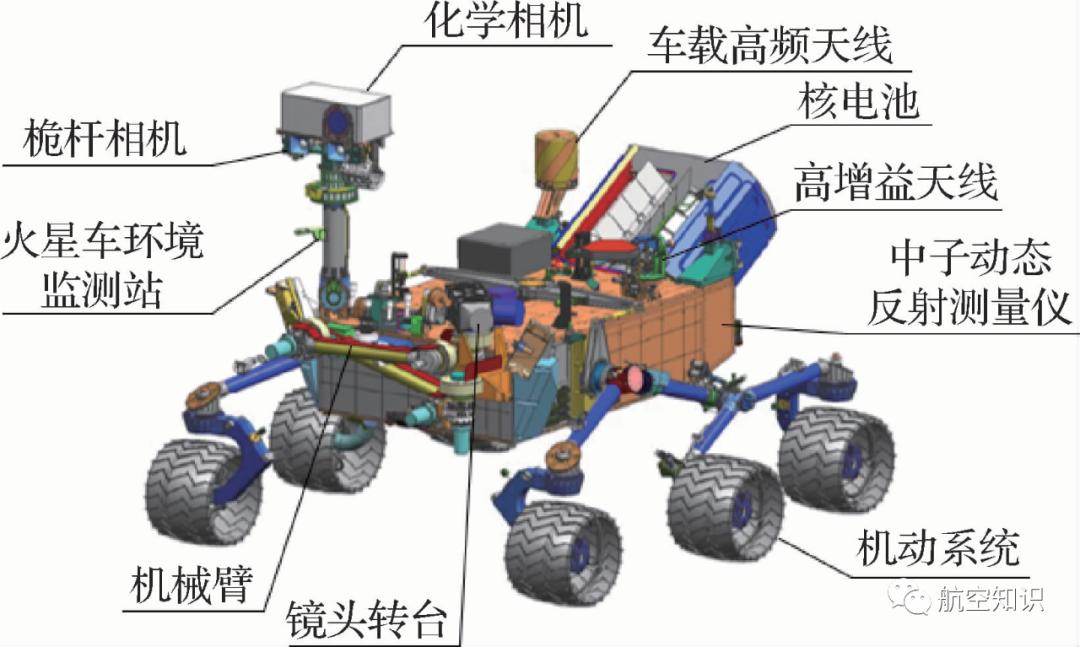
好奇号结构组成
好奇号的移动系统为6轮主副摇杆系统,使火星车能够越过车轮大小的岩石或壕沟。除直线行驶外,火星车能够实现弧线转弯和原地转弯,见图5。另外,主副摇杆系统能够承受车体倾斜60°、吸收着陆和行走过程的冲击载荷。摇杆-转向架机构与差速器保证火星车在严重不平整路面移动时,6个车轮与地面也接触良好。这样的设计有两个优势:其一,每个车轮受力均匀,该性能对火星车在松软土壤中行走至关重要,因为压力集中会导致车轮沉陷;其二,火星车在越障时,保证总有车轮与地面接触并提供驱动力,从而增强其越障能力。
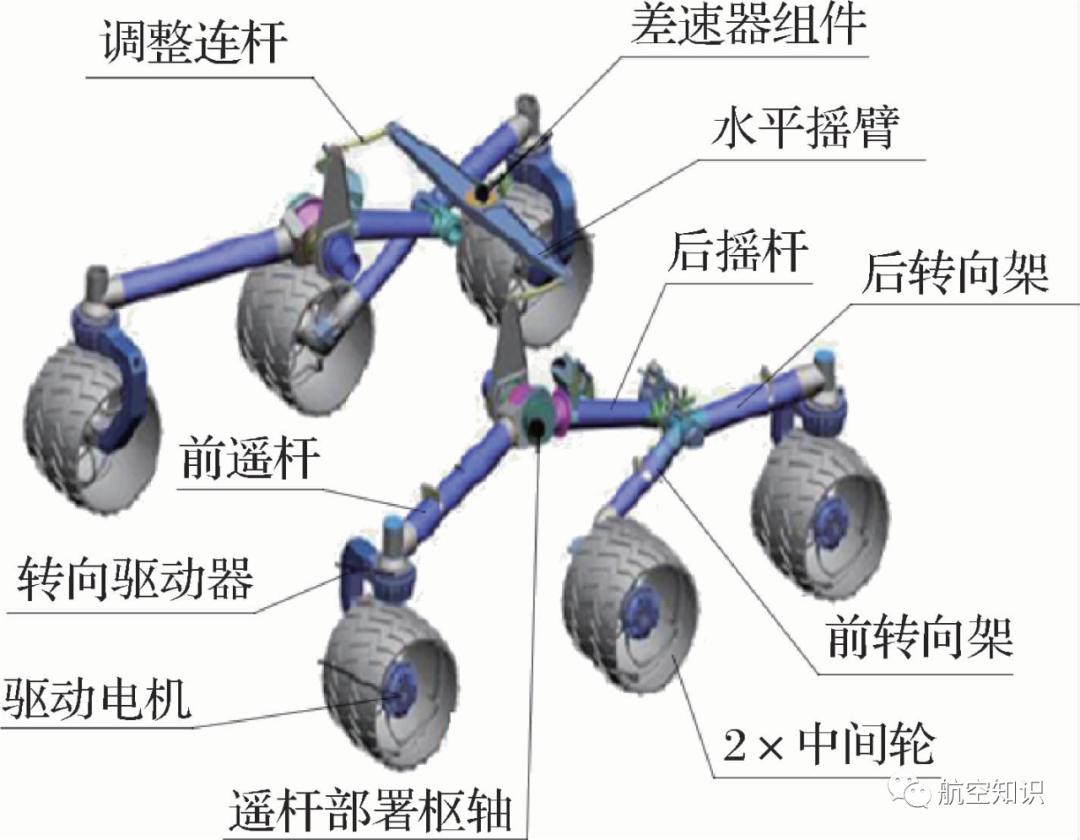
好奇号摇杆转向架移动系统
SPACE
星表机器人的未来
随着星表探测任务越来越复杂,对星表移动探测机器人的要求也将越来越高,未来的星表移动探测机器人必须具备更长的移动距离、更高的移动速度、更强的越障能力和更大的科学载荷承载能力,因此对星表移动探测机器人的机构设计提出了更高的要求,其未来可能的发展趋势如下:
1
星球表面崎岖不平的路况对星表移动探测机器人的越障能力提出了较高要求。轮式机器人可通过底盘的优化提高越障能力;轮腿复合式机器人兼具轮式高速移动和腿式越障能力强的优点,将是一个大的发展趋势方向。
2
由于航天器对尺寸及重量有严格的限制,减少星表移动探测机器人的质量和体积具有较大意义。在保证正常功能的前提下,通过优化设计、采用较轻材料等手段可降低探测机器人的质量;采用新型的具有大折展比的结构设计可降低探测机器人所占体积。
3
星球表面上存在较多的未知情况和各种潜在威胁,需保证星表移动探测机器人的高可靠性。子母式机器人和弹跳式机器人将是一个大的发展趋势,子机器人既可以减少航天器的发射重量、节省空间,又可以降低母机器人探测风险、扩大探测范围;弹跳式机器人具有优越的被动地形适应能力和高机动性,将成为极端危险又具有高科考价值的探测区域的首选机器人。
原标题:《从月球到火星 | 详解星表机器人的前世今生》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

