- +1
日本灾后救援机器人:福岛核事故后,它们帮助人类阻止核泄漏
日本是一个具有先进机器人技术的国家,同时也是地震、海啸灾害频发的国家。所以,无人机和机器人一直在日本的灾害搜救中起着重要的作用。而2011年福岛因海啸衍生核灾,由于现场辐射量远高于人体可以承受的水准,机器人更是在现场调查和事故清理中,起到了不可替代的作用,日本也由此启动了几个机器人研发项目。
2017年8月24日,在世界机器人大会(World Robot Conference)第二天的主论坛报告会上,日本东北大学教授、IEEE国际机器人与自动化协会现任主席的田所谕(Satoshi Tadokoro)做了题为《日本灾后救援机器人》的演讲,介绍了日本在灾后救援机器人方面的前沿研究和应用,下面为经过编辑的演讲内容:

今天我想为大家介绍一下日本的救灾机器人。一个典型的救灾过程包括四个环节:在灾难发生后,首先是开始救援,在此之后就需要重建家园,然后是恢复正常的生产和生活,最后需要对所造成的问题进行调查,以便在下一次灾难发生之前做好准备。这四个环节中,机器人都可以发挥作用,因为机器人的有些功能,人类现在是做不到的。比如,日本的福岛核电站发生泄漏之后,人不能进去,只能让机器人进去。

这是一个最常见的机器人,我也参与了它的开发,它的名字叫做Queens,这是最早在福岛核电站调查当中使用的机器人。调查人员可以从操作台对Queens的行动进行监测,可以看到它从一层到二层和三层,然后实时地去检测核电站内部的情况,而且还可以拍摄到反应堆内部的照片,给我们提供了非常多的信息,帮助我们对福岛核电站的泄漏事件做出回应,并制定相应的救援措施,包括对核辐射的水平做出反应。

当时日本政府和东电公司都希望,能够重新启动这个核电站的冷却系统,因为里面的温度已经到了98℃,已经是一个开水的温度了,所以我们需要使用备用的冷却系统,让核反应堆冷却,但是因为里面的情况我们不知道,所以就使用Queens机器人对里面的情况进行调查,然后Queens给我们提供非常细节的数据。之后它又进行了多次行动,一个月之后温度降下来了,所以,在这个事件中,机器人发挥了很大的作用。
在这个经验的基础上,日本政府启动了几个项目。这些救灾机器人项目的目的,不仅仅是针对核电站的灾难,还有所有的自然和人为灾害。机器人主要是用于救援和防灾,因为在有些情况下这些工作是高风险的,而且用人的话效率不高,所以就要使用机器人。但我们把机器人用在这个领域也有一些问题,最大的问题就是技术太脆弱了,也就是说我们的技术在那种恶劣的环境下的表现并不好。比如在我们这个会议厅里,机器人可以很好地移动,但是在灾难的现场,机器人就不能很好地移动了,也移动不起来,因为技术太脆弱了。比如,你可以想象一下,它的摄像、成像系统在我们会议厅里什么都可以看见,但是在很黑的环境下就看不见,或者在雾里面也看不见,或许风速很快或者雨很大的话,它也看不见,所以这种脆弱性必须要解决。

这个项目当中,我们试图开发出具有那种更强壮的、更强大的视觉系统的飞行机器人(Aerial Robot),尤其是极端情况下的视觉系统。这里所谓的视觉系统并不是机器人本身能不能到那个地方,而是它能不能在现场进一步精密地感知,以便获得更好的信息。这些对现场情况的估测非常重要,同时对机器人在灾难环境当中的自我恢复能力也非常重要。有的时候亚洲国家会发生很多地震,我们也需要使用机器人救援,就像在福岛核电站一样。

我们还需要开发下一代能够应对紧急情况的建筑机器人(Construction Robot),它们可以在灾区重建当中发挥作用,可以完成非常复杂的任务,也会监测周围的物体。
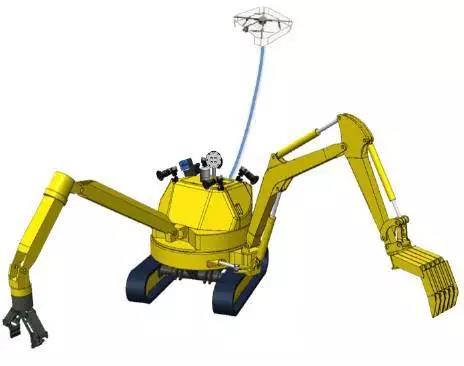
建筑机器人头上拴着的这个飞行机器人可以长期飞行,配合地面的机器,提供整个区域的鸟瞰图,另外在强风的状态下也可以通过这个机器人负载的几个摄像头形成一个立体的照片。机器人获得的信息很快就回馈到了操作员那里,操作员就可以远程进行及时的调整,建筑机器人的前臂也有震度感应器,碰到某个物体的时候会感应或者判断这个物体的大小。为了能够高精确度地完成任务,我们提高了建筑机器人的能力,它的表现要比现有的机器人更好,而且烟和霾都不会对它造成影响。因为它的摄像头是自带光的,所以在黑暗和雾中也可以看得清楚。

这种搜救机器人(Cyber Rescue Robot)主要是用于在石堆当中发现遇难者和幸存者,我们把它和搜救犬进行了对比,通过机器人的一些摄像头和图像识别的功能,它可以识别人的鞋或者其它的衣物。这个机器人使用的是机器学习和人工智能,它可以自动地去发现那些已经储存进去的图片。在这个机器人的帮助下,这只搜救狗找到了需要援救的人员的位置。而且机器人的图像识别功能,能够自动地识别出这个受害者,这样的话,整个搜救能力都得以大幅度提升。
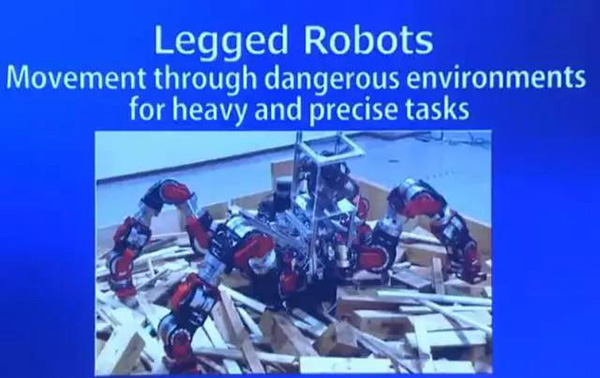
可以帮助人们在很多危险环境当中完成工作,这是一个有四条腿的机器人,里面加装了很多电器和传感器。除了能够行走和提起一些东西之外,它还能够做一些更为复杂的运动。
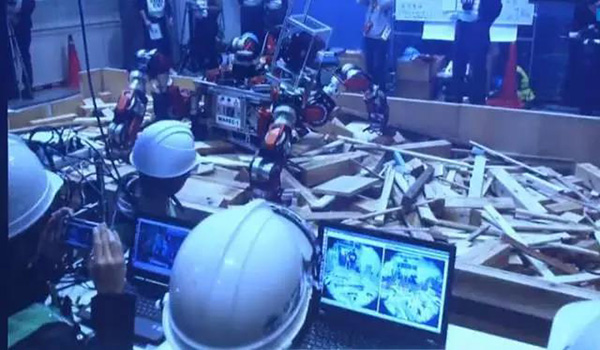
我们在远程控制这个机器人的同时,也要关注这个机器人周边的环境,在选择机器人运动路线的时候,也要紧密地关注周围的路径。但是,我们可能无法看到机器人上面的图像,所以我们也在想办法,看看如何能够通过计算机图像技术解决这个图像的盲点。在遇到坍塌或者爆炸的时候,人们一般很难进入,这种多臂机器人就能够帮助我们进入到这些危险的环境当中。

这个粗型蜿蜒机器人(Thick Serpentine robot)上面有RM传感器,可以调整充气时的压力,所以无论是在水平还是在竖直的管道当中都可以爬行,甚至可以在管子内部进行爬行,或者通过扩张的压力挤住管子进行爬行。我们可以通过声音的传输计算距离,甚至在不平的地面上也可以进行移动,它可以通过身体的扭曲进行移动,这种蜿蜒的机器人能够在一些人类难以接触的工厂或者地理位置进行探索,比如震后很多地方其实是人力很难接近的,而这些机器人甚至可以爬上60度甚至70度陡峭的坡。
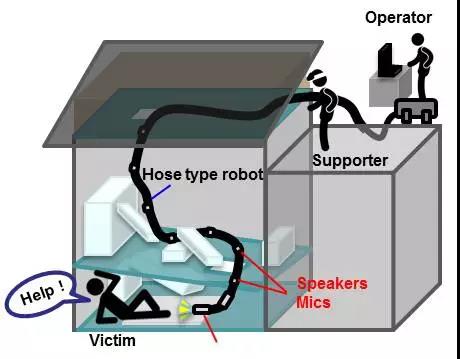
这种轻型蜿蜒机器人(Thin Serpentine robot)可以在坍塌的房屋下面搜救受害者,可以很快地帮助我们找到受害者,并且很好地勘探出周围的环境。这种非常灵活的蜿蜒机器人加上线缆,能够进入到一些非常狭窄的空间当中,并且也能够实现远程遥控,通过远程遥控能够看到里面的环境,搜救的过程当中可以很好地触摸、看见并且听见里面的情况,使搜救人员在救援的过程当中能够有更清晰的认识。
通过多振动传感器,这个机器人能够预估前面的物体的距离,并且这种振动传感器还能够实时回传数据。机器人能够通过视觉识别的技术,发现里面的东西,随着进入的空间越来越深,甚至可以用麦克风的声音传输,来探索周边的环境。我们可以通过这些远程信息判断机器人的位置,通过这种多麦克风的配置和声音的传输很好地判断它的位置,并通过这种方式找到受害者,且对周边环境进行研究。
最后总结一下:灾后机器人能够在灾后的响应、复苏和预防中发挥非常重要的作用,刚才我也跟大家介绍了我们是如何应对这些挑战的。但我们要知道,灾害是非常常见的,在中国、日本和世界其他国家都一样,所以我们需要在技术领域进行合作,而“一带一路”是一个非常重要的概念,可以推进我们的合作。
人物介绍:
田所谕(Satoshi Tadokoro)教授毕业于东京大学,自2005年起任日本东北大学教授,2014年成为该校副院长,并于2014年起担任研究教授。自2002年开始,Satoshi Tadokoro担任国际救援系统研究机构主席,2016年至2017年期间担任IEEE机器人与自动化学会主席。2002年至2007年期间,他担任了MEXT DTT救援机器人项目的项目经理。他亦曾担任NEDO灾害机器人项目的首席研究员,他领导的团队研发出了多个救援机器人。他是IEEE会员、日本机器人学会会员、日本机械学会会员和日本仪器与控制工程师学会会员。
(本文首发于微信公众号“环球科学ScientificAmerican”,澎湃新闻经授权后转载)



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

